The goal of this work is to present an innovative design for a smart robotic gripper, which is able to grasp different randomly deployed prismatic and cylindrical packages and orient them through a mechanically passive alignment system with sensing capability. It consists in a new concept of end-effector combined with an ad-hoc path planning for aligning residual worst cases. The system uses gravity and an angular sensor embedded into the gripper to detect the object orientation and, if necessary, formulate a control strategy to align it before the release phase. An initial screening experiment was executed to find the parameters that most influence the alignment angle and execution time. Two worst-case pack ages were tested in different working conditions. The results show that the percentage of success of the system is high even in the worst operating conditions.
## I. INTRODUCTION
Picking, aligning, and placing objects of different shapes and sizes is a very common task in the automation industry. The most commonly used interfaces for picking involve vacuum force obtained via suction cups and sponges or mechanical friction provided by soft and rigid jaws [^1], which have the higher capability to grip objects of different shapes, volumes, and masses without changing the jaw shapes. The jaws can be designed in different configurations and actuated either by pneumatic systems, which are noisy and expensive as they require a vacuum line, or by mechanical systems.
Parallel configuration is the most commonly used for picking objects of standard geometries, since higher dexterity configurations require a complex and expensive adaptive control strategy. One example of high dexterity configuration is the dexterous hand presented in [^2], [3] and [4]. Examples of the complexity of the control strategy for this kind of solutions are reported in [5] for rolling approach, in [6] for sliding approach and [7] for gaiting approach. The choice of using a parallel gripper is justified in the manufacturing field by Bracken [8], who proposed a geometrical classification of parts to be gripped into six shape categories (i.e., spherical, rectangular, cylindrical, triangular, holed and flexible) and stated that the gripper able to deal with most shapes is the parallel two-jaw gripper.
Assuming that a robotic system is composed of a robot and a mechanical parallel gripper, it is possible to solve the alignment problem with two strategies: using a high degree of-freedom manipulator equipped with a gripper that has no alignment capability or performing the alignment by using the gripper rather than robot kinematics. Holladay et al. [9] demonstrated that the task can be solved in a shorter time and with a smaller work space using the second approach.
The orientation problem using only the gripper can be solved in several ways, but the most commonly used is pivoting [10]. It consists in closing the gripper jaws in such a way that the object can rotate around the axis passing through the contact points. Rao et al. [11] demonstrated the effectiveness of this orienting technique by making four degree of freedom robot to move a polyhedral part in space (along all the object's degrees of freedom). This approach takes advantage of gravity to complete the alignment so that the alignment system can be defined as passive. It also introduces a constraint on the gripping distance from the object's center of mass. Making the realignment system to be active allows to get rid of this constraint and to control the alignment angle, but the introduction of additional hardware decreases reliability while increasing costs.
In this paper, we propose and validate a new design with a passive realignment system to be integrated into parallel mechanical grippers. In addition, in pick and place operations it can be necessary to choose if the object has to be realigned or not, a problem that is addressed using a passive mechanical system integrating an angular sensor monitoring in real- time the inclination of the object and synthesising an appropriate control strategy based on planned actions.
## II. RELATED WORKS
An example of a passive system is given by [12], where each jaw has a vertical V-groove cavity with a small hard contact point attached to an elastic strip that orthogonally crosses the groove. When the gripping force is low, the rotation is obtained by pivoting the object around the axis created by hard contact points that are free to rotate. When the force increases, the strip goes into the groove, thus constraining the object. The interesting feature is that the type of contact between the object and the jaw is a function of the gripping force. Although not suitable for cubic objects, this solution can be retrofitted to different parallel jaws. Another possible detrimental effect is that the point-like contact may damage the object surface, which is also subject to wear, and requires high accuracy in sensing the object to grasp and in planning for the proper gripping point. Additionally, the proper grip ping force is another feature to be defined, which requires precise knowledge of the gripper-object friction coefficient.
Two other interesting examples are available in the literature, both based on pneumatic actuation. The one presented in [13] solves the problem of the correct gripping force choice by introducing an active rubber diaphragm between the jaw body and the fingertip. A bearing allows the fingertip to freely rotate when the diaphragm is not inflated, then the inflation allows it to stop quickly at a given angle. This design has the advantages of being fast and independent on the object geometry and grasping force. Additionally, it is equipped with a rotary magnetic encoder that allows for feedback control. The main limitation is the need for a pneumatic system.
The other solution presented in [14] uses an inflatable membrane to change the shape of the contact interface: when the pressure is high, the fingers have a prismatic shape and contact is restricted to a small area (ideally two points); when the pressure is low, the shape smoothly becomes a V-groove cavity, where cylindrical objects are held. The advantage of this design is that it is independent of the object geometry although it is only suitable to align cylindrical shapes and, again, it needs to be actuated by a pneumatic system.
The solution here presented is purely mechanical and passive, and integrates a sensing system. It can work with a wide range of object shapes while avoiding the use of a pneumatic system. It allows for a simpler, more reliable, and more cost-effective jaw design. The encoder also performs quick fault diagnosis, increasing robustness.
## III. THE PASSIVE-SENSING JAWS
The jaws of the parallel gripper were designed with an innovative passive auto-alignment capability.
Each of the two jaws has a different design and accomplishes different functions in the alignment operation. The one in Fig. 1 only works as a pivot to align the object, the other in Fig. 2 has three additional features:
1. a v-groove cavity;
2. a counterweight at an offset to the rotation axis;
3. a rotation sensor.
The v-shape, provided with an elastic film, is made to better secure cylindrical objects, the surrounding planar surface is instead used to improve contact with prismatic pack

Fig. 1: Detail of the jaw provided of polymeric disc pad
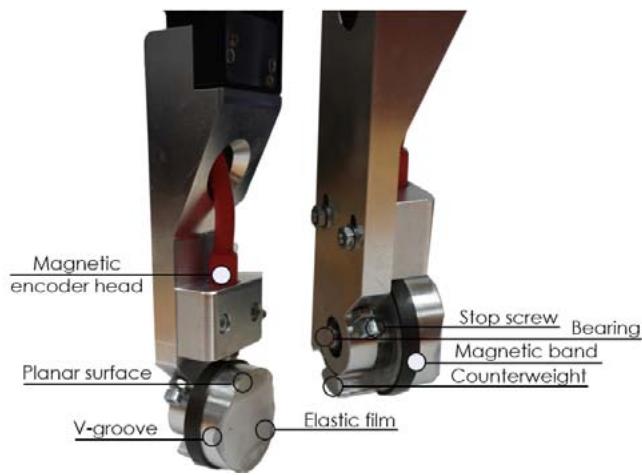 Fig. 2: Detail of the jaw provided of balancing mass and magnetic encoder
ages. The counterweight, on the other hand, has different functions: when the object is not grasped it makes the v shaped cavity parallel to the ground, allowing reliable grasping of cylindrical objects that lie with their axis parallel to the ground. The direction of the object's rotation depends on which side of the center of gravity it is grasped. On one side of the center of gravity, Fig. 3 (Extension 1), the object is not aligned because the rotation imposed by the gravity makes the counterweight motion in the direction of its end-stroke already reached. On the other side, Fig. 4 (Extension 1), the counterweight rotates in the other direction, making the package free to rotate in the same direction and reach its vertical position determined with the contact with a stop screw. The reason why screws are used as mechanical stoppers is that the final angle can be tuned by tightening them. The tuning interval is [-6,20] degrees around vertical position. The rotation of the contact surfaces is obtained for both jaws using SKF 628/6-2Z deep groove ball bearings. The material used for both jaws is aluminum 7075 with an interchange able polyoxymethylene pad in the free rotating gripper disc to change the friction value.
The second jaw, Fig. 2, has a support for the reading head of a magnetic encoder used to read the angle value. The sensor used is the LIKA SMB5 magnetic sensor together with LIKA MT50 tape. The angular resolution after wrap




Fig. 3: Main sequence for moving a cylindrical object without alignment: (A) gripping with v-shaped cavity parallel to the ground, (B) lifting with fixed object, (C) releasing without movement of the jaw disks





Fig. 4: Main sequence for moving a cylindrical object with alignment: (A-B) gripping with v-shaped cavity parallel to the ground, (C) lifting with the object rotation until the end of the counterweight stroke (D), (E-F) releasing with the counterweight and v-shaped cavity moving parallel to the ground ping the magnetic strip on a $32\mathrm{mm}$ diameter cylinder be comes $1.15^{\circ}$, maximum speed is $16\mathrm{m s^{-1}}$ (100 rad $\mathrm{s}^{-1}$ ). The encoder is equipped with the external LIKA IF40 converter that performs interpolation and provides digital output. The angle sensor is added also with the purpose of making the system able to detect faults and misalignment. It enables the robot controller to move the end-effector so that the object can be aligned in the best possible way, in terms of time and final angle with respect to the vertical direction, before re leasing the package. In case of fault the system could drop the object and run again an alignment process.
## IV. EXPERIMENTAL ANALYSIS ON PHARMACEUTICAL PACKAGING
The application fields of the developed system are many. In this work it has been tested for the alignment of packages for pharmaceutical use. In particular, their shape can be both prismatic and cylindrical with the geometric requirements of Fig. 5. As shown in Fig. 5, the average percentage (AVG) of cylindrical packages out of the overall worldwide packages depends on the country. Their weight is less than $800\mathrm{g}$.
The packages has to be placed in a position of maximum-stability: the cylindrical have to be placed in vertical position; the prismatic maximizing the contact surface.
## V. SYSTEM DESIGN
This section describes the important features of the hard ware components and the developed software used for statistical experiments.
### a) Hardware Components
Fig. 6 shows the components used for testing.
Robot: The robot is the HS-4345 4-axis SCARA robot designed by Denso robotics. It has four links connected with three revolute and one prismatic joints.
Controller: The RC8 controller is the interface between the robot and the PC. From a software point-of-view, the ORiN middleware is used to build the client application to communicate with the controller. In this work the coded client application requests a service sending a packet over TCP stream using b-CAP communication protocol. Server assigns commands and responds to the client to confirm the service execution is completed.
Laser: Keyence LK-G157 laser displacement was used to set the position of the object's center of mass with respect to the object's main axis. The repeatability of the instrument is $0.5\mu \mathrm{m}$.
Parallel gripper: The Shunk WSG 50 parallel gripper is used to actuate prototype jaws. It is equipped with force and position sensors and controlled sending commands via TCP/IP protocol.
### b) Software Description
A state machine was designed to control the whole alignment process, whose main states, summarised in Fig. 7, are:
Idle: In Idle state the system is waiting to receive the object information about its shape, dimensions, mass, position and orientation, and if it has to be placed in maximum stability condition or only its location has to be changed. For the test application presented in this paper, all these information in were provided manually as input, while, in actual operative conditions, a dedicated vision system connected to a database will be used.
Positioning: In positioning state, the robot moves to the gripping point specified with a final end-effector position in the operational space and following an optimal planned path.
Gripping: Here the gripper grabs the object and uses its force sensors to detect the presence of the object: in case the object is lost, an error is returned and the system goes back to Idle state.
Lifting: The robot lifts the object and, depending on the gripping point, the object will be aligned or not. The height at which the object is lifted depends on object dimension and on the gripping point. When package alignment is needed, the lifting and pivoting phases show a dumped second order dynamic with different characteristics for different medicine packages, as shown by the encoder signals time evolution in Fig. 8 obtained with a sampling frequency of $100\mathrm{Hz}$.
Robot Moving: The robot moves the object to the release point. During this phase the gripper, with its alignment axis, must always be orthogonal to the tangent of the trajectory. The direction of the robot's motion is selected such that the inertial force caused by the robot's acceleration adds an alignment torque to the package (i.e. it pushes the object to the mechanical stroke limit). In this way, if the object is already at the end of its stroke, the lateral acceleration acts on a constrained degree of freedom and does not affect the final angle.
Object Release: This final phase is crucial for the success of the orientation process and only depends on the final angle at the end of the motion phase. Fig. 9 shows the geometric condition for correctly releasing the cylinder in its stable configuration (cone stability).
The critical value of $\beta$, $\beta_{cr}$, is found making the ratio between the position of the object center of mass (CM) and the object diameter at the bottom surface.
Perception Loop: In the Perception loop the smart end effector perceives and combines information such as the current gripper position $P_0$, the final desired one $P_{\rho}$, the current object angle $(\theta_t)$, the gripping distance $(h)$. w.r.t. the center of mass $(CM)$, the object diameter $(D)$ and its height $(H)$, to plan the trajectory. Those information are used to realign the package using a reference alignment vertical plate if the object needs to be further aligned before release.
In particular, by the perceived information, the robot moves the gripper to the plate at a distance based on the radius of the cylindrical envelope of the package increased by a safety factor $(d_{t})$. A parametric arc movement forces the gripper to be parallel to the vertical plate, Fig. 10. The path chosen in this way guarantees the packages to be tangential to the wall at the final point $P_{p}$.
In this phase, the value of the object inclination $(\theta_{t})$ is constantly checked along the planned gripper trajectory to determine when the object can be correctly released.
In Fig. 11 it is shown the sampled signal (100 Hz sampling frequency) of the rotary sensor during a full
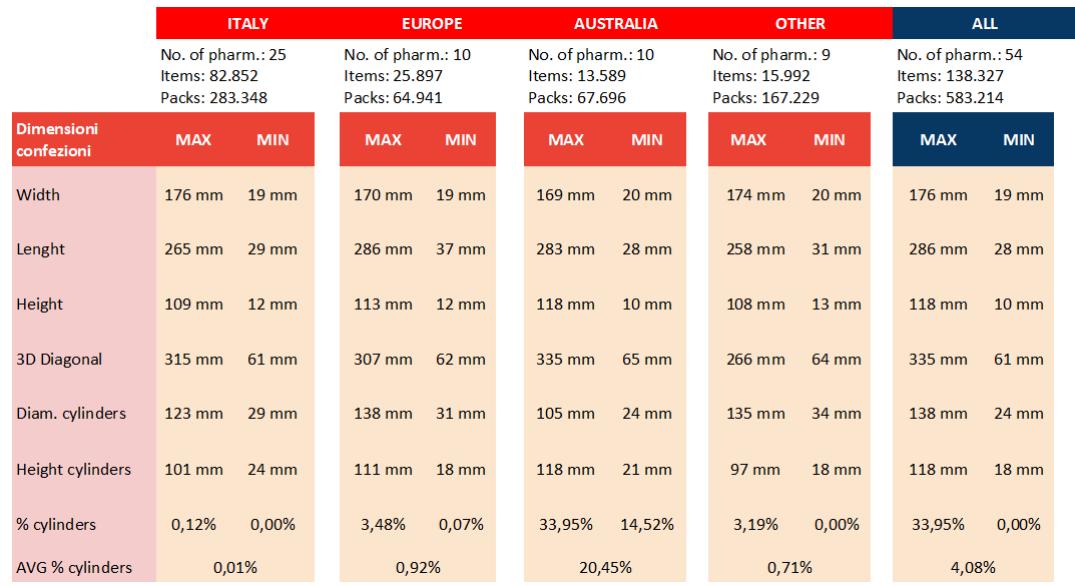
Fig. 5: Size of drug packages worldwide
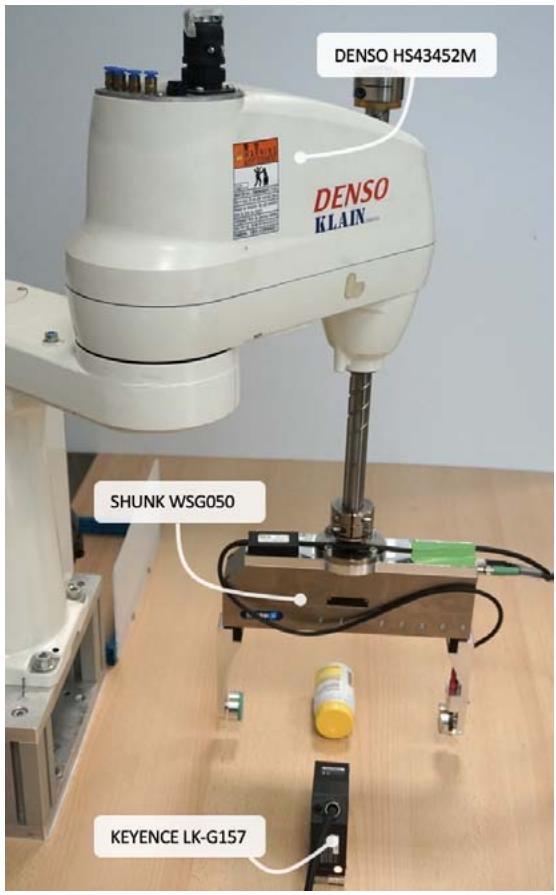 Fig. 6: System Architecture
alignment cycle and the effect of the different phases of the alignment cycle on the angle, described in the Perception Loop phase. In particular, at 3.5 s the object is gripped and lifted, reaching a final angle of approximately $40^{\circ}$. The robot forward acceleration makes the angle to stabilize around $55^{\circ}$ at 5.5s, but this is not sufficient for having a successful release because the critical angle for this particular package equals $68^{\circ}$.
As a consequence, the robot moves towards the vertical plate, that makes the final angle to be around 90 degrees allowing a safe release.
The code to manage the finite state machine for picking, positioning, aligning and releasing operations is written in C language on Microsoft Windows operating system. A multi-thread application was coded to simultaneously control the SCARA robot, the gripper and read the angle value, Fig. 12.
## VI. DESIGN OF THE EXPERIMENTS
In this section we carry out a statistical analysis to validate the system design and present the obtained results. The design validation should verify the following hypothesis: system is able to pick up, perform pivoting and aligning of packages of different shapes and weights, in a reduced amount of time and with a low error percentage.
A first factorial screening experiment is performed in order to identify factors that have stronger influence on the pivoting capability. The response surface is then obtained and used to find the factors combination that leads to the worst final angle and the largest settling time. In other terms, this first experiment allows to obtain the worst operating condition for pivoting success. In this condition the complete pick align-place operation is performed to check the robustness of the system with real drug packages. In this final study, the effectiveness of the system is assessed through the percentage of successfully completed alignment operations.
All the statistical analysis was performed in RStudio, an integrated development environment for R programming language.

Fig. 7: State Machine with transition conditions
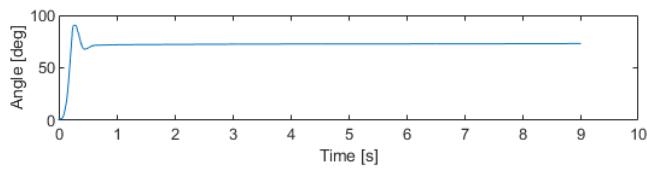
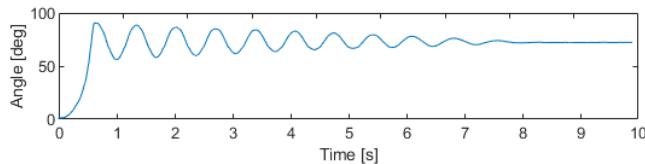
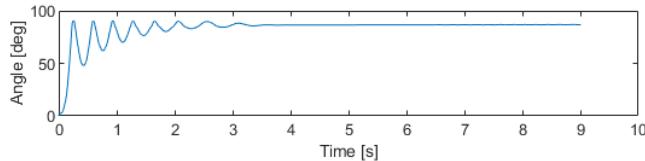
Fig. 8: Three signals sampled during the lifting and pivoting phase for different packages: The upper plot refers to large diameter, high package filled with homogeneous material. The middle one refers to large diameter, low height package filled with homogeneous material and the bottom one refers to small diameter, high package filled with non-homogeneous material
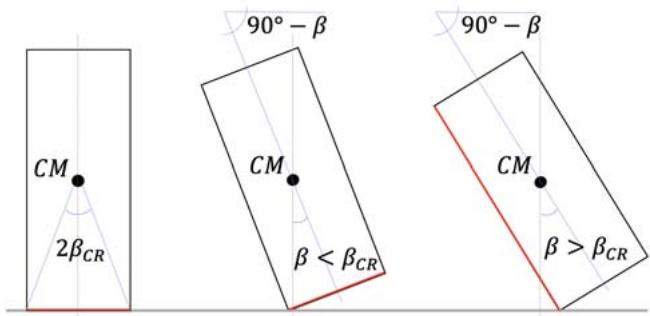 Fig. 9: Geometric condition for alignment success (cone of stability) with
$\beta$ the package's angle with the vertical plane and $\beta_{cr}$ the threshold angle for stability. In red the final stability side of the package after release
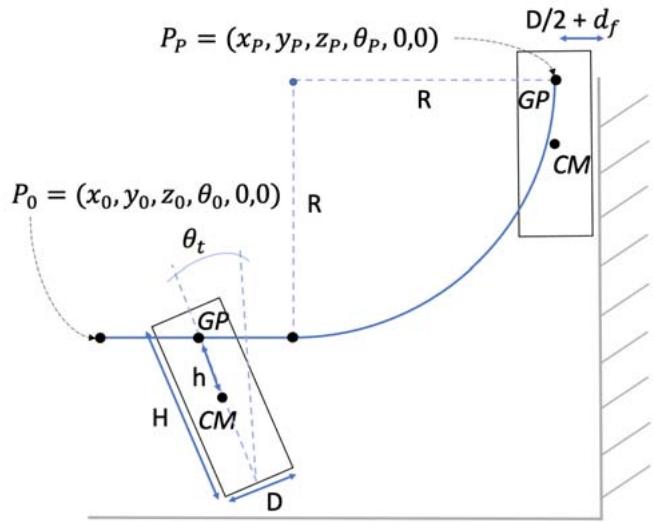 Fig. 10: Parametric arc curve from initial object's position
$P_0$ to its final position $P_{\rho}$
### a) Screening Experiment
The factorial experiment is the most efficient type of experiment for screening. After obtaining the factors significance, the objective is to obtain the response surface. The factorial design is augmented with several observations at the center to fit a model linear in all factors but one, which is quadratic. If the ANOVA shows that the quadratic term is significant, then we need to augment the factorial plan to a $3^n$ Central Composite Design, if not, a linear $2^n$ model is a reliable approximation. Blocking is used to perform sequential experimentation and augment the factorial design only if the second-order model is needed [15].
The choice of factors levels comes from prior and actual knowledge of the process and is made to fit the real operating conditions of the process when performing the central composite design. The design factors chosen for the factorial experiment with their low $(L)$, center $(C)$ and high $(H)$ levels are reported below.
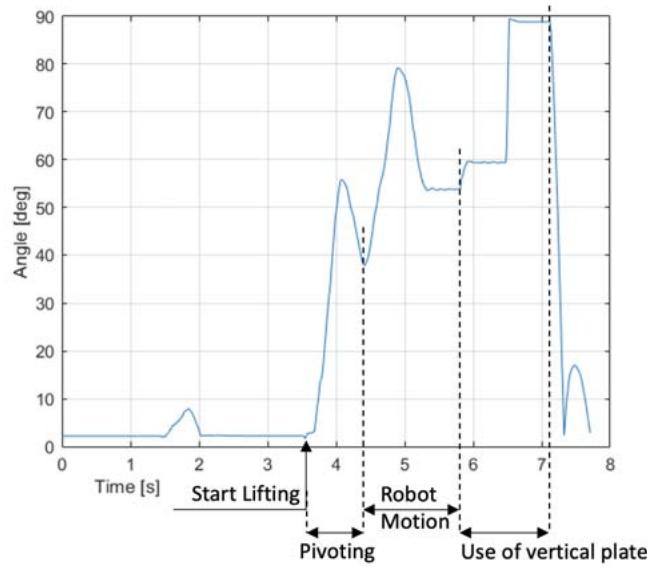
 Fig. 11: Angle signal sampled during a full alignment cycle Fig. 12: Communication protocols overview
A. Distance percentage w.r.t. the geometrical center of mass, Fig. 13(b); L: $10\% - C: 50\% - H: 90\%$.
B. Object diameter; L: 35mm - C: 52.5mm - H: 70mm. C. Object height; L: 60mm - C: 90mm - H: 120mm.
D. Distance percentage of the inner material center of mass w.r.t. the container center of mass, Fig. 13(a); $L: 0\% - C: 50\% - H: 100\%$.
E. Robot vertical acceleration (percentage of the maximum allowed for the package mass); L: $20\%$ - C: $40\%$ - H: $60\%$.
F. Friction coefficient at gripping interface; $L$: standard interface - $C$: elastic film on V-shaped cavity - $H$: elastic film on both interfaces.
G. Gripping force; L: 10N - C: 19N - H: 28N.
All the other controllable factors affecting the alignment operation are held constant. The most relevant assumptions made during factors selection are presented hereafter.
Assuming that the gripper always makes the pivoting axis orthogonal to the cylinders longitudinal axis, the only gripper degree of freedom that is varied is the position along grip ping axis, all the others are held constant. Also the vertical distance of the grip from the plane is assumed fixed because, even if there is an error in estimating the diameter of the object, the V shape helps to center the grip.
When gripping an object, the gripping force rises from zero to its nominal value with a dynamics that depends on equivalent stiffness and damping at gripping interface. Here the transient is considered negligible and the force is assumed to ideally go from zero to its nominal value before gripping starts.
Mass, volume, inertia moment, diameter, height and gripping distance are not independent factors, so it is not possible to design an experiment taking all of them as factors.
Volume V, inertia moment, gripping distance $d$ and material type are substituted with two factors: the relative distance of gripping point from the geometrical center of mass (A) and the relative distance of the center of mass of the inner material from the geometrical center of mass of the container (D). This is non-zero when the material is non-homogeneous, while it is zero otherwise. For non-homogeneous materials, we refer to the unconstrained material contained within the package, e.g., pills or powders. On the other hand, for homogeneous material we refer to uniformly constrained materials such as fully filled liquid jars or thick creams.
The response variables of particular interest to characterize the alignment process are the final angle and the settling time. The first quantifies the alignment in steady state condition, when oscillations are completely damped, the second instead takes into account the alignment dynamics.
To satisfy the statistical requirements of the independence of observations, the matrix for the final design was generated randomizing the experiment order. A set of different 3D printed cylindrical objects is used to create all combinations of geometrical factors, shown in Fig. 14. They are filled with materials of different densities in order to obtain the same mass value. In Fig. 14, the orange and the black objects are filled with homogeneous and non-homogeneous material, respectively. In the latter case, the ratio between the position of the material center of mass w.r.t. the cylinder and the cylinder height is constant.
## i. Results
The analysis of variance is performed on the factorial design added with central points. The fitted model for angle response variable is Angle $\sim A * B * C * D * E * F * G + A^2$, the one for time variable is Time $\sim A * B * C * D * E * F * G + A^2$. The F values and p-values of the factors are reported in Tab. 1 and Tab. 2. The quadratic term is added to check if the $2^n$ factorial plan has to be augmented to a $3^n$ Central Composite Design. The high p-value of the quadratic term in both models proves that the linear model is sufficient to describe the system behaviour.
The analysis of variance response surfaces are then obtained fitting a first order model to the factorial data added to central points. Finally, the steepest descent path is determined to obtain the combination of factors that led to the worst condition for final angle and aligning time. A visual interpretation is given here reporting the values of factors when moving down the steepest descent path at 0.5 distance from the center point and at the factors high level (distance 1 from the center point). Results are reported in Tab. 3 and Tab. 4.
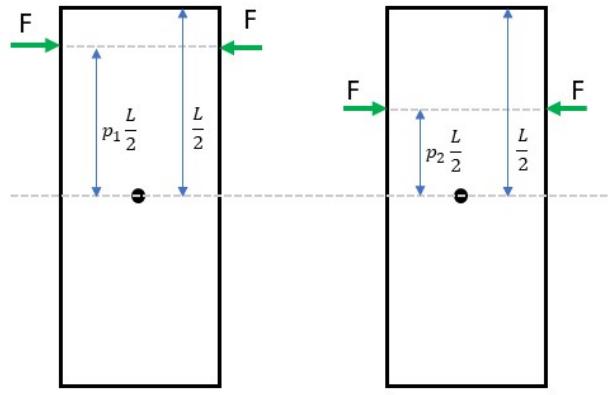
(a) Factor A measurement
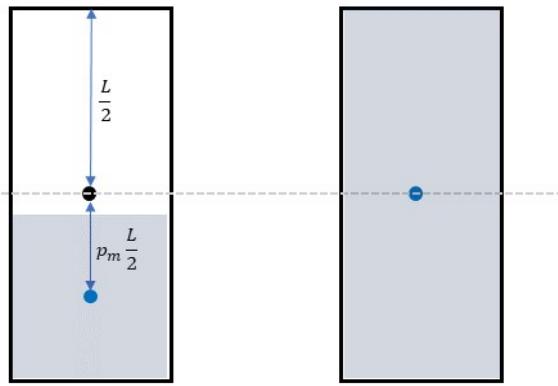
(b) Factor D measurement Fig. 13: Relative definition for factors
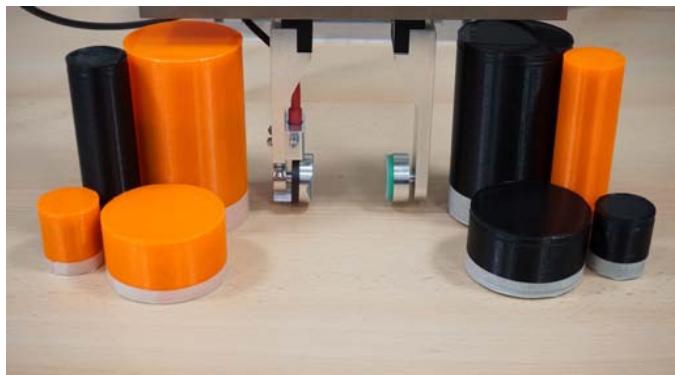 Fig. 14: Cylindrical 3D printed objects representing different factors combinations
The worst case for the final angle in the chosen range of operating conditions occurs when pivoting is performed with:
- A: low gripping distance percentage
- B: high diameter
Table 1: ANOVA results for angle variable
<table><tr><td>Factor</td><td>F value</td><td>p-value</td></tr><tr><td>(A) Gripping distance</td><td>341.46</td><td>4.84e-13</td></tr><tr><td>(B) Diameter</td><td>1448.04</td><td>< 2.2e-16</td></tr><tr><td>(C) Height</td><td>996.87</td><td><2.2e-16</td></tr><tr><td>(D) Material</td><td>37.57</td><td>9.521e-09</td></tr><tr><td>(E) Vertical acceleration</td><td>5.547</td><td>0.02</td></tr><tr><td>(F) Friction coefficient</td><td>14.14</td><td>2.54e-4</td></tr><tr><td>(G) Gripping force</td><td>0.38</td><td>0.54</td></tr><tr><td>A2</td><td>0.60</td><td>0.44</td></tr></table>
Table 2: ANOVA results for time variable
<table><tr><td>Factor</td><td>F value</td><td>p-value</td></tr><tr><td>(A) Gripping distance</td><td>3157.99</td><td>< 2.2e-16</td></tr><tr><td>(B) Diameter</td><td>280.32</td><td>< 2.2e-16</td></tr><tr><td>(C) Height</td><td>232.70</td><td>< 2.2e-16</td></tr><tr><td>(D) Material</td><td>15.73</td><td>1.193-4</td></tr><tr><td>(E) Vertical acceleration</td><td>11.31</td><td>1e-3</td></tr><tr><td>(F) Friction coefficient</td><td>10.71</td><td>1.36e-3</td></tr><tr><td>(G) Gripping force</td><td>142.88</td><td>< 2.2e-16</td></tr><tr><td>A2</td><td>2.43</td><td>0.12</td></tr></table>
Table 3: Factors value on the steepest descent path for angle surface
<table><tr><td>Dist.</td><td>A</td><td>B</td><td>C</td><td>D</td><td>E</td><td>F</td><td>G</td></tr><tr><td>0</td><td>0.00</td><td>0.00</td><td>0.00</td><td>0.00</td><td>0.00</td><td>0.00</td><td>0.00</td></tr><tr><td>0.5</td><td>-0.20</td><td>0.33</td><td>-0.29</td><td>0.12</td><td>-0.02</td><td>0.02</td><td>0.01</td></tr><tr><td>1</td><td>-0.42</td><td>0.59</td><td>-0.60</td><td>0.32</td><td>-0.09</td><td>0.04</td><td>0.02</td></tr></table>
The worst case for the aligning time in the chosen range of operating conditions occurs when pivoting is performed with:
- A: high gripping distance percentage
- B: high diameter
- C: high height
- D: non-constrained material
- E: high vertical acceleration
- F: low friction coefficient
- G: low gripping force
Table 4: Factors value on the steepest descent path for time surface
<table><tr><td>Dist.</td><td>A</td><td>B</td><td>C</td><td>D</td><td>E</td><td>F</td><td>G</td></tr><tr><td>0</td><td>0.00</td><td>0.00</td><td>0.00</td><td>0.00</td><td>0.00</td><td>0.00</td><td>0.00</td></tr><tr><td>0.5</td><td>0.23</td><td>0.28</td><td>0.27</td><td>-0.09</td><td>0.00</td><td>-0.06</td><td>-0.19</td></tr><tr><td>1</td><td>0.47</td><td>0.55</td><td>0.54</td><td>-0.21</td><td>0.05</td><td>-0.13</td><td>-0.35</td></tr></table>
These results are in accordance with the physics of the problem. The system can be modeled as a damped physical pendulum with additional energy loss caused by the bump against the stop screw. The amount of energy dissipated during the bump depends on the restitution factor. For what concerns the final angle, its value depends on the final balance between the torque of the gravity force that acts on the package center of mass and the unbalancing mass one. A short gripping distance implies a short lever arm for the gravity torque, resulting in a lower angle value. The unconstrained material moves to the bottom of the

(a) Package 1: $520 \times 44 \, \text{mm} \, 52 \, \text{gr}$

(b) Package 2: $90 \times 35 \, \text{mm} \, 175 \, \text{gr}$ Fig. 15: Worst package for release (a) and for pivoting (b) container, making the aligning torque after transient to be larger than the constrained case. It follows that the worst case is represented by the constrained material case. A high gripping force can prevent the bearings from correctly rotate and a low acceleration does not help in the aligning operation.
Analyzing the time variable, the high gripping distance con tribute to have a larger torque, while the non-constrained material adds an aligning torque to the system when the package starts to rotate. The large diameter and large height condition makes the inertia moment, and consequently the kinetic energy, to be higher. The kinetic energy is also increased by the large vertical acceleration. Since a larger kinetic energy implies to have more bumps and a longer transient, the final aligning time results to be longer.
The time needed for the entire aligning operation depends on several factors, one of the most relevant being the package initial and final position and orientation. Moreover, the aligning angle and time are highly depending on the robot lateral dynamics. By assuming that the robot will be operated to minimize the time of the process, next experiments to validate the gripper in the whole robotic system are performed fixing only the geometric conditions at their worst for the aligning angle:
- B: larger diameter
- C: short height
- D: homogeneous material
### b) Testing: Pick-align-place
The worst-case drug package characteristics found for pivoting in Section 5.1 are not the same as those for the re lease operation. The latter case is influenced only by pure geometric considerations from the values of the position of the center of mass and the diameter of the object at the bottom surface as seen in section 4.1. In contrast with the diameter, the position of the center of mass is affected by uncertainty, especially if the material contained in the package is not homogeneous. We can assume that the center of mass in the geometric center of gravity is a good approximation and conservative. In fact, even though pharmaceutical packages contain heterogeneous material, due to the effect of gravity during rotations, the inside material would go to the lower part and this would lower the center of mass increasing the critical angle for stability. To have a small height and small diameter implies a lower critical angle, so another package of drugs was selected to take into account the worst case for release, which is reported in Fig. 15(b).
In order to provide a complete analysis of the system, two test campaigns were carried out to validate the robustness of final design on both worst cases with packages of Fig. 15. The centres of mass of both packages correspond to the geometric centres due to the homogeneity of the material contained inside.
In order to take into account the most critical source of uncertainty related to the identification of the object position and therefore its center of mass estimation, both the previously defined drug packages are tested randomly varying the gripping point between $10\%$ and $90\%$ of their half eighth (Fig. 16). In both cases, 200 gripping positions are generated from a uniform distribution, and the releasing success is tested for both packages after pivoting only and also with the robot moving on a trajectory.
## i. Results
The results of these experiments are presented in Tab. 5 and Tab. 6. All the incorrect alignments occurs when the gripping distance is near $10\%$.
## VII. CONCLUSION
In this paper, we have presented an innovative design for a smart robotic gripper able to grasp objects of cylindrical and prismatic shapes and then orient them through a mechanically passive alignment system. The gripper is endowed with sensors to detect object misalignment and, if necessary, uses an external vertical plate for re-orientation. The statistical performance analysis shows that the worst condition for the pivoting operation is represented by small height, large diameter packages filled with homogeneous material. Moreover, geometrical considerations on object stability are made to find the worst packages characteristics for release success: small height, small diameter, filled with homogeneous material.
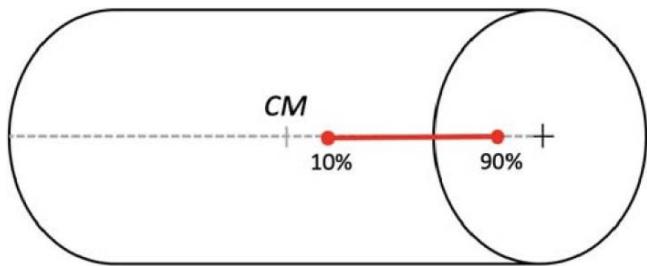 Fig. 16: Gripping interval between
$10\%$ and $90\%$ of the cylindrical package half height
Table 5: Percentage of alignment success for package 1
<table><tr><td colspan="3">Success rate for the worst package for pivoting</td></tr><tr><td>After pivoting</td><td>After motion</td><td>After aligning loop</td></tr><tr><td>84.5%</td><td>97.5%</td><td>98.5%</td></tr></table>
Table 6: Percentage of alignment success for package 2
<table><tr><td colspan="3">Success rate for the worst package for release</td></tr><tr><td>After pivoting</td><td>After motion</td><td>After aligning loop</td></tr><tr><td>87.5%</td><td>96.5%</td><td>99%</td></tr></table>
Two commercial packages representing the two worst cases are tested in different working conditions. When both packages are released after the vertical motion of the robot, considering also the robot lateral motion and using an additional vertical plate as backup solution to complete the alignment operation, the success rate considering also the worst cases is around $99\%$.
The cases in which the alignment is not successful are those in which the gripping point is close to the center of gravity. The probability of success consistently increase with a vision system that can reliably estimate the position of the centre of mass. The results show that the percentage of success of the system is high even in the worst operating conditions, see Extension 1.
### ACKNOWLEDGEMENTS
The authors thank GPI SpA[^1] for providing the main requirements and hardware used for testing. Further thanks go to Lika[^2] for the encoder components.
[^1]: https://www.gpi.it _(p.10)_
[^2]: https://www.lika.it _(p.10)_
No ethics committee approval was required for this article type.
Data Availability
Not applicable for this article.
How to Cite This Article
Alessandro Luchetti. 2026. \u201cPassive Sensing Jaw for Grasping and Orienting\u201d. Global Journal of Research in Engineering - A : Mechanical & Mechanics GJRE-A Volume 22 (GJRE Volume 22 Issue A2).
Explore published articles in an immersive Augmented Reality environment. Our platform converts research papers into interactive 3D books, allowing readers to view and interact with content using AR and VR compatible devices.
Your published article is automatically converted into a realistic 3D book. Flip through pages and read research papers in a more engaging and interactive format.
Our website is actively being updated, and changes may occur frequently. Please clear your browser cache if needed. For feedback or error reporting, please email [email protected]
Thank you for connecting with us. We will respond to you shortly.