In this paper we researched about different ad hoc routing protocols for VANET. The main aim of our study was to identify which ad hoc routing technique has better execution in highly mobile environment of VANET. To measure the performance of routing protocols in VANET, we considered two different situations i.e. city and highway. Routing protocols were selected carefully after carrying out literature review. The selected protocols were then evaluated through simulation in terms of performance metrics i.e. throughput and packet drop. From results, we observe that A-STAR shows better performance in form of high throughput and low packet drop as compare to AODV and GPSR in city environment, while GPSR shows better performance as compare to AODV in both highway and city environment of VANET.
## I. INTRODUCTION
VANET is a specific instance of remote multihop network, which has the imperative of quick geography changes because of the great hub portability. With the increasing number of vehicles equipped with computing technologies and wireless communication devices, inter vehicle communication is becoming a promising field of research, standardization, and development. VANETs empower a wide scope of utilizations, for example, counteraction of crashes, security, blind intersection, dynamic course planning, continuous traffic condition checking. Another important application for VANETs is providing Internet connectivity to vehicular nodes. Figure 1 shows an example of a VANET. Because of high portability, successive changes in geography and restricted life time are such attributes of this network that settle on steering choices really testing. A few different factors, for example, street design and various conditions, for example, city and roadway makes directing more testing in VANET. As opposed to topology based routing of MANET, VANET uses position information of the participating nodes within the network to take routing decisions. Further we will discuss how position based routing used for VANET.
 Figure 1: Example of VANET
## II. ROUTING IN VANET
VANET uses position information of the participating nodes within the network to take routing decisions. Further we will discuss the routing used for VANET.
### a) Position Based Routing (PBR)
The dynamic and profoundly versatile nature of VANET, where hubs act exceptionally quick and changes its area as often as possible requests such routing technique that can manage the climate of such organization. These demands tend the researchers to use positions of nodes in order to provide successful communication from source to destination. Such method in which geographical positions of nodes are used to perform data routing from source to destination is called position based routing. Position based routing accepts that every hub knows about its physical/geographic situation by GPS or by some other position deciding administrations. In it each node also has the knowledge of source, destination and other neighboring nodes. As compared to topology based routing, position based routing uses the additional information of each participating node to applicable in VANET, that additional information is gathered through GPS. Position based routing gives hop-by-hop communication to vehicular organizations. A position based steering convention comprises of many significant parts, for example, "beaconing", "area administration and servers" and "recuperation and sending systems".
- Beaconing: In it a node forwards packet with the current physical position and the unique id (IP ADDRESS). If node receives beacon from its neighbor's then it updates its information in location table. Thus beaconing is used to gather information of node's one-hop neighbor or node's next hop neighbor.
- Location service and servers: When a node does not contain current physical position of a specific node in its location table or want to know current physical position of any specific node then location service assisted to find current position of a specific node.
- Forwarding and Recovery strategy: Forwarding and recovery strategy are used to forward data from source to destination node.
### b) Greedy Perimeter Stateless Routing (GPSR)
Greedy Perimeter Stateless Routing (GPSR) is one of the best examples of position based routing. GPSR involves nearest neighbor's data of objective to advance bundle. This technique is otherwise called ravenous sending. In GPSR every hub knows about its present actual position and furthermore the adjoining hubs. The knowledge about node positions provides better routing and also provides knowledge about the destination. Then again adjoining hubs likewise helps to settle on sending choices all the more accurately without the impedance of topology data.
### c) Geographic Source Routing (GSR)
Because of lacks of GPSR in presence of radio obstructions, network requested new steering procedures that can contend with moves occurred because of radio deterrents. Along these lines, Geographic Source Routing (GSR) is proposed. It manages high versatility of hubs on one hand, then again it utilizes streets design to find courses. GSR finds the destination node using "Reactive Location Service (RLS)". GSR combines both geographic routing and road topology knowledge to ensure promising routing in the presence of radio obstacles.
### d) Anchor-based Street and Traffic Aware Routing (A-STAR)
Anchor-based Street and Traffic Aware Routing (A-STAR) is position based directing protocol. The improvement of A-STAR was inconsideration with city climate. In city area, almost all roads and streets are covered by big buildings and there are close ends in the streets and so frequent stop signal, turns and speed breakers make routing more challenging. Problems faced by the position based routing protocols in city environment defined before in GSR. The capability of A-STAR protocol to overcome these problems will be defined here. A-STAR is anchor based routing protocol. In anchor based routing before to communicating the packet, source hub address include the header of packet and data of all middle hub intersection that parcel should venture out to arrive at the destination. To use city maps and road information of town to make routing decisions called "Spatial Aware Routing". Spatial awareness is used to get topology information and different nodes position in the network.
## III. SIMULATION MODEL
Simulation is the procedure of taking care of issues by the perception of the exhibition, throughout the time, of a powerful model of the framework. Reproduction for the most part addresses the connection between the frameworks and models. A framework is the collection of parts that are interrelated and associated so that it recognizes the framework from its current circumstance.
### a) Performance Metrics
In this paper we have selected throughput and packet drop to check the performance of VANET routing protocols against each other. The justification for the choice of these presentation measurements is to really take a look at the exhibition of steering conventions in exceptionally versatile climate of VANET. Moreover, these performance metrics are used to check the effectiveness of VANET routing protocols.
### b) Implementation
In this step we produce the simulation results and run simulation for two unique situations to assess the presentation of routing protocols for VANET as far as various execution boundaries that is throughput and packet drop. We designed two unique networks for these situations the two of them comprises of vehicular hubs.
## i. Highway Scenario
The highway situation we chose 25 hubs with the total area of $1400 \times 700$ meters. Distances between the vehicles are arbitrarily chosen. In first case, vehicles move with most extreme speed of $25 \mathrm{~m} / \mathrm{s}$ and in later case vehicles move with speed of $30 \mathrm{~m} / \mathrm{s}$. All out reenactment time for every situation is 450 seconds. The motivation of simulation for highway situations is to check the conduct of AODV and GPSR routing protocols for VANET as far as throughput and packet drop.
Table 1: Input parameter for highway scenario
<table><tr><td>Parameter</td><td>Setting</td></tr><tr><td>Environment size</td><td>1400 x 700 meters</td></tr><tr><td>Total no of nodes</td><td>25</td></tr><tr><td>Node Type</td><td>Highly Mobile nodes</td></tr><tr><td>Node Speed</td><td>25 m/s</td></tr><tr><td>Packet Type</td><td>UDP</td></tr><tr><td>Packet Size</td><td>1400 Bytes</td></tr><tr><td>Simulation Time</td><td>300 seconds</td></tr><tr><td>No of Receiver</td><td>One</td></tr></table>
In this situation every simulation was performed for 300 seconds. 25 nodes (vehicles) were chosen as the members of organization and every node development was profoundly portable. Every node furnished with 802.11b wireless module for communication with different nodes. Nodes move with speed of $25\mathrm{m}$ and $30\mathrm{m/s}$. In this simulation AODV and GPSR routing protocols were chosen for simulation and their performance will be checked as far as throughput and packet drop.
# a. Throughput
Throughput is the normal number of effectively delivered data packets on a communication network or organization node. At the end of the day throughput portrays as the all out number of received packets at the objective out of complete sent packets. Throughput is calculated in bytes/sec or information packets per second.
$$
\text{Throughput (bytes / sec)} = \frac{\text{Totalnumberofrecievedpacketsatdesitation * packetsize}}{\text{Totalsimulationtime}}
$$
If network throughput is high it means most of the sent packets to destination has been received, thus this factor reduce delay as packet receive success rate is high.
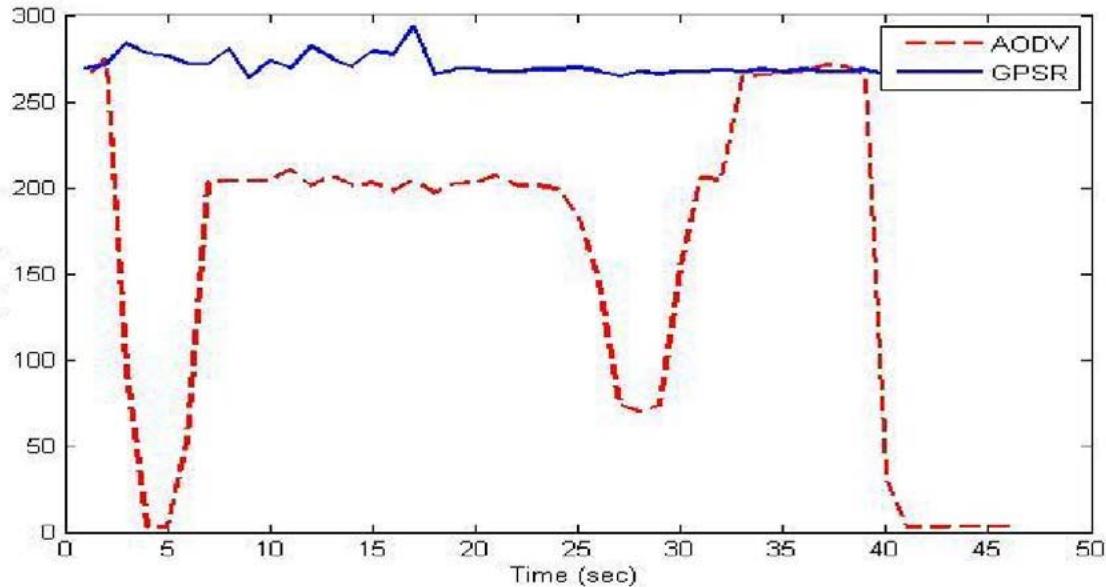 Figure 2: Throughput with $25\mathrm{m / s}$ node speed
Figure 2 depicts the organization throughput of AODV and GPSR routing protocols with the node speed of $25\mathrm{m/s}$ on highway. For this situation we can see that AODV throughput rate begins with the roughly 275 Kbytes/sec and inside matter of seconds the throughput rate tumbled to the least level for example roughly 5 KB/sec. In spite of the fact that AODV is one of the most amazing illustration of receptive routing techniques yet in the profoundly mobile environment of VANET its performance decline abruptly to the least level as far as throughput. AODV throughput rate become higher after some time and maintain its throughput rate for sometime this is due to the feature of AODV in which it repeatedly sent the request for forwarding packets towards destination but its disadvantage is that it uses more network resources to resend the route request. As compared to AODV, GPSR shows higher throughput rate in entire simulation time. GPSR throughput rate in the highly mobile environment of VANET is constant. GPSR uses greedy forwarding with the combination of perimeter forwarding to ensure maximum delivery of packets at destination.
# b. Packet Drop
Packet drop shows total number of data packets that could not reach destination successfully. The reason for packet drop may arise due to congestion, faulty hardware and queue overflow etc. Packet drop affects the network performance by consuming time and more bandwidth to resend a packet. Lower packet drop rate shows higher protocol performance.
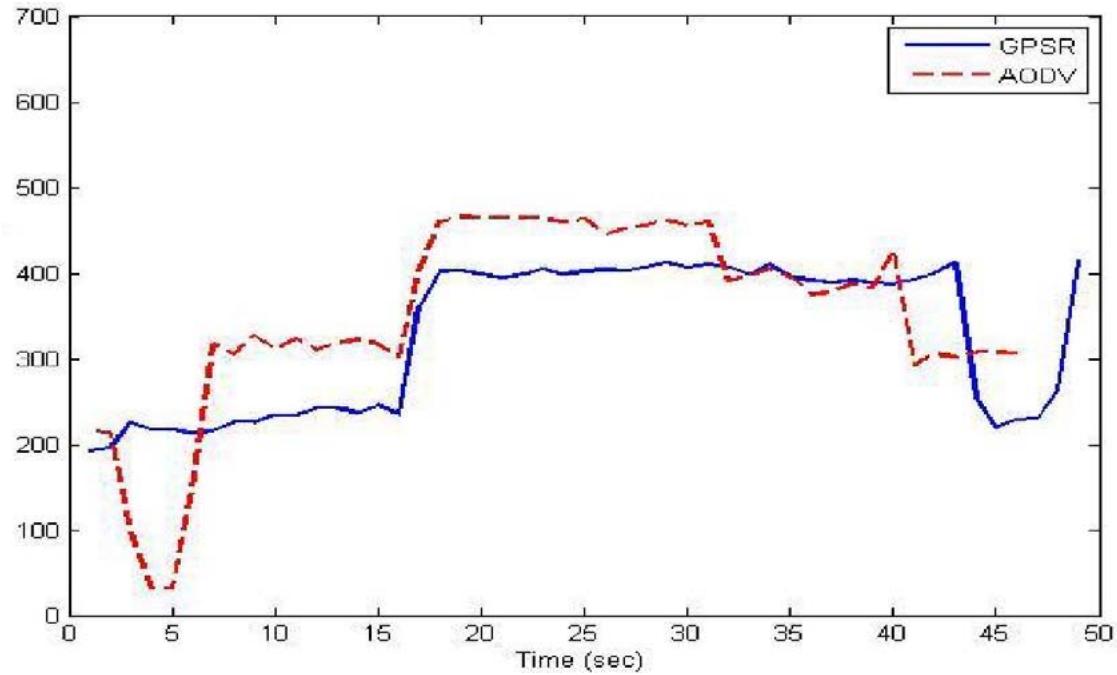 Figure 3: Packet Drop at $25\mathrm{m / s}$ node speed
Figure 3 shows behavior of AODV and GPSR as far as packet drop at most extreme node speed of 25 m/s. For AODV routing protocol the bundle drop rate for initial 5 seconds diminished from approx 225 to 25 parcels. However, this decline in packets is just briefly and in a matter of moments the packet drop proportion of AODV becomes higher to 300 bundles drop and it bit by bit increment with the time. The reason for the higher packet drop in AODV is expected to the multi-bounce nature of the organization.
In this way in highway situation with the nodes most extreme speed of $25\mathrm{m / s}$ there is just a slight distinction in AODV and GPSR in term of packet drop proportion. In general in this situation GPSR has dropped lower number of parcels when contrasted with AODV. Besides, in thruway situation we determined just those drop bundles that lost between the last moderate hub to objective. Consequently, in the present circumstance a throughput and drop bundles don't have any immediate connection.
## ii. City Scenarios
An organization to actually take a look at execution of routing protocols within the sight of various radio impediments for example (totally block signals, for example, structures and so forth The primary intend to plan this organization is to check how unique directing conventions experienced the radio snags and which steering convention has better adaptability in city streets.
In this scenario each simulation were performed for 300 seconds. 25 nodes (vehicles) were selected randomly and each vehicle equipped with IEEE 802.11 (b) wireless module. Nodes move with maximum speed of $10\mathrm{km/h}$. 1500 meters of total simulation area were selected. 15 different completely block radio obstacles (consider them as buildings etc) were placed aside the roads to interrupt the communication. In this scenario A-STAR, GPSR and AODV routing protocols were selected to check their performance in terms of throughput and packet drop. Each input parameter for city scenario is shown in the following table:
Table 2: Input parameter for city scenario
<table><tr><td>Parameter</td><td>Setting</td></tr><tr><td>Environment Size</td><td>1500 meter</td></tr><tr><td>Total no of nodes</td><td>25</td></tr><tr><td>No of radio obstacles</td><td>15</td></tr><tr><td>Node Type</td><td>Highly mobile nodes</td></tr><tr><td>Node Speed</td><td>10 m/s</td></tr><tr><td>Packet Type</td><td>UDP</td></tr><tr><td>Packet Size</td><td>1200 bytes</td></tr><tr><td>Simulation Time</td><td>300 seconds</td></tr><tr><td>No of Receiver</td><td>One</td></tr></table>
Figure 4 shows performance of AODV, GPSR and A-STAR as far as throughput within the sight of radio obstructions at city streets. AODV begins with the high throughput rate yet inside a few seconds its throughput rate significantly diminished to nothing.
Furthermore, there was sudden rise and fall in the throughput rate and at approximately 25 seconds throughput rate of AODV suddenly reached at the maximum level where the throughput rate was 300 KB/ sec but this rate only for couple of seconds then its again dramatically decreased to zero and for the rest of communication there was only a short increase in the AODV throughput.
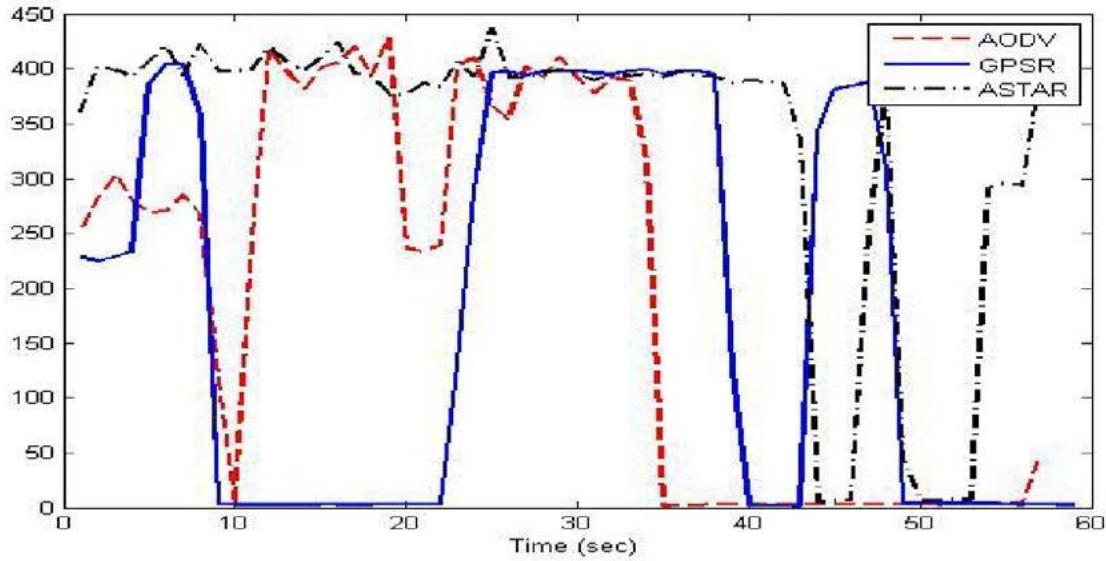 Figure 4: Throughput in City Scenario
On the other hand GPSR shows the average throughput results in the city scenario. There were also some dramatically changes in the performance of GPSR shown in Figure 4. Although GPSR is a position based routing protocol but its performance was average and at some level throughput rate reduced to zero.
On the whole it can be concluded that A-STAR has better performance in terms of throughput as compared to GPSR and AODV where there is number of obstacles interrupt the communication. Furthermore, GPSR outperformed AODV in terms of throughput.
### b. Packet Drop
The normal number of dropped packets by AODV, GPSR and A-STAR routing protocols within the sight of deterrents. Figure 5 shows unsteadiness in the exhibition of every one of the three routing protocols as far as packet drop. AODV packet drop rate was high than GPSR and A-STAR. While AODV showed unforeseen outcomes in the enormous city conditions by dropping less number of packets for the initial 25 seconds. As distance between the nodes with in the city environments are less and also the vehicles moved with low speed that is why AODV successful to deliver some packets to the destination as it received RREP from the closed nodes immediately. But this low drop packet rate only for the short time interval after some time AODV had highest number of dropped packets, it may due to the communication obstacles between the nodes.
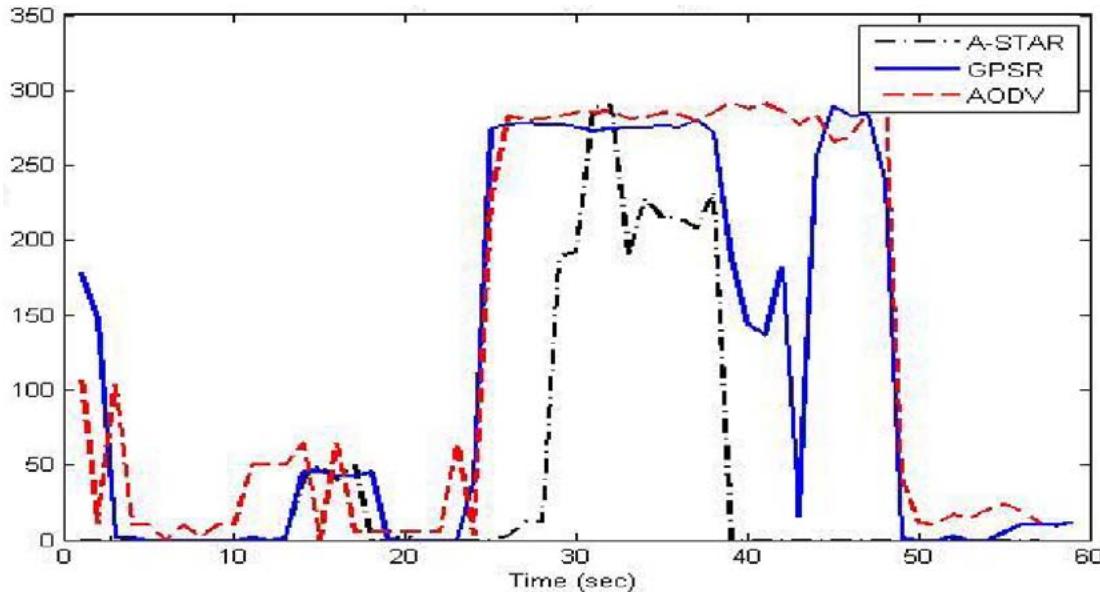 Figure 5: Packet Drop in city scenario
A-STAR has less number of drop packets at the start but there was sudden change in its performance and number of drop packets increased. Sudden increment in drop packet rate may be due to the packet traverse to such anchor path that is temporarily marked as "out of service" by A-STAR.
## IV. CONCLUSION
It was observed that position based routing protocols shows preferable outcomes over customary specially appointed adhoc routing protocols in VANET. We evaluate two position based routing protocols that are GPSR and A-STAR in two unique situations of VANET. GPSR beats AODV totally in both roadway and city conditions of VANET. While GPSR affected with the involvement of obstacles in the large city environments. On the other hand A-STAR outperforms both GPSR and AODV in city environments of VANET. As A-STAR uses the anchored based street information to find the routes in large city 52 environments, therefore it is not an alternative for highway scenarios. So we understood that A-STAR is versatile for such conditions of VANET where quantities of hubs are higher and radio obstructions required, while GPSR is solid for direct correspondence among nodes. Besides, all position based routing protocols can't manage all different conditions of VANET.
Generating HTML Viewer...
References
14 Cites in Article
Yu Wang,Fan Li (2009). Vehicular Ad Hoc Networks.
B.-C Seet,G Liu,B.-S Lee,C Foh,K Wong,K.-K Lee (2004). A-STAR: A Mobile Ad Hoc Routing Strategy for Metropolis Vehicular Communications.
C Tee,Alex Lee (2008). Survey of position based routing for Inter Vehicle Communication system.
Akira Takano,Hiraku Okada,Kenichi Mase (2007). Performance Comparison of a Position-Based Routing Protocol for VANET.
Rakesh Shrestha,Rojeena Bajracharya,Seung Yeob,Nam (2018). Challenges of future VANET and cloudbased approaches.
Wenshuang Liang,Zhuorong Li,Hongyang Zhang,Shenling Wang,Rongfang Bie (2015). Vehicular Ad Hoc Networks: Architectures, Research Issues, Methodologies, Challenges, and Trends.
No ethics committee approval was required for this article type.
Data Availability
Not applicable for this article.
How to Cite This Article
Dr. Gurjeet Singh. 2026. \u201cPerformance Evaluation for Ad hoc Routing Protocol in Vehicular Ad hoc Network (VANET)\u201d. Global Journal of Computer Science and Technology - E: Network, Web & Security GJCST-E Volume 22 (GJCST Volume 22 Issue E1): .
Explore published articles in an immersive Augmented Reality environment. Our platform converts research papers into interactive 3D books, allowing readers to view and interact with content using AR and VR compatible devices.
Your published article is automatically converted into a realistic 3D book. Flip through pages and read research papers in a more engaging and interactive format.
In this paper we researched about different ad hoc routing protocols for VANET. The main aim of our study was to identify which ad hoc routing technique has better execution in highly mobile environment of VANET. To measure the performance of routing protocols in VANET, we considered two different situations i.e. city and highway. Routing protocols were selected carefully after carrying out literature review. The selected protocols were then evaluated through simulation in terms of performance metrics i.e. throughput and packet drop. From results, we observe that A-STAR shows better performance in form of high throughput and low packet drop as compare to AODV and GPSR in city environment, while GPSR shows better performance as compare to AODV in both highway and city environment of VANET.
Our website is actively being updated, and changes may occur frequently. Please clear your browser cache if needed. For feedback or error reporting, please email [email protected]
Thank you for connecting with us. We will respond to you shortly.