The quality of soil preparation for greenhouses is a key factor influencing crop yields in organic farming. Several machines perform various operations for working with greenhouse soil: a soil removal machine, a loader-mixer for soil components, and a machine for laying soil components. Theoretical research has established that the greatest influence on the power of the component laying machine comes from: the speed of the conveyor chain, the angular velocity of the dosing drum, the number of conveyor scrapers, and the number of drum slats. For the power of the soil removal machine, the influencing factors are: the size of the cut soil layer, the speed of the machine itself, and the angle of the bucket surface.
## I. INTRODUCTION
The preparation and use of greenhouse soil is one of the most energy- and labor-intensive operations in growing plants in protected soil. The quality of the prepared soil directly affects the yield of the crops grown, and consequently, the cost of the final product. Previously, a technological scheme for the preparation, use, and removal of greenhouse soil was proposed By previously finding expressions for determining each term and performing the corresponding mathematical operations, equation (1) will take the form:
$$
P_{y} = \left\{\left(K_{c\partial} l_{c\kappa} b_{c\kappa} \tau_{c\partial} + g \rho_{\kappa m} l_{c\kappa} b_{c\kappa} h_{\kappa} f_{\theta H} + g \rho_{\kappa m} l_{c\kappa} b_{c\kappa} h_{\kappa n} f_{H} + m_{c\kappa} \frac{v_{c}}{t}\right) \frac{l_{m p}}{l_{c\kappa}} + \sigma_{\kappa} b_{c\kappa} h_{o\kappa}\right\} v_{c} + 0,5 z_{n1} D_{n1} \omega_{61} \left(m_{1} \frac{\omega_{61} R_{61}}{t} + f_{\theta H1} m_{\kappa\delta1} g - m_{1} g \cos \beta\right) + 0,5 z_{n2} D_{H2} \omega_{\delta2} \left(m_{2} \frac{\omega_{6} R_{6}}{t} + f_{\theta H2} m_{\kappa\delta2} g - m_{2} g \cos \beta\right), \tag{2}
$$
Where, $K_{c\partial} -$ coefficient of increase in the shear area, accounting for the deviation of the actual shear surface shape from the theoretical for the chain conveyor; $b_{c\kappa}$ width of the conveyor scraper, m; $\mathsf{h}_{\mathsf{c}\kappa}$ height of the conveyor scraper, m; $\rho_{\kappa \mathrm{T}}$ density of the component transported by the conveyor, kg/m3; $\nu_{c}$
[1,2]. This technology is based on the use of a comprehensive set of machines for working with greenhouse soil: a combined layer, a loader-mixer, and a soil removal machine [3-5].
One of the key indicators of the efficiency of these machines is the power required to drive their working elements or to move the machine while performing technological operations. The power value is influenced by both structural factors-related to the design and geometric parameters of the working elements and operational factors-related to their movement parameters.
The aim of this study is to determine the specific structural and operational parameters that have the greatest impact on the power of the considered machines; to establish the nature of this dependency; and to justify the parameter values at which the power value is minimized.
The research conducted jointly with Ph.D. in Technical Sciences Mukhin D.V. and Ph.D. in Technical Sciences Levchenko A.V. allowed us to establish analytical and experimental dependencies of power on structural and operational parameters for each machine [6-7].
The main working elements of the combined layer are the chain conveyor and the dosing drums. Therefore, the total drive power of the machine $P_{y}$ (W) will be equal to the sum of the power consumed by the drive (power on the shaft) of the chain conveyor $P_{\mathrm{tp}}$ (W) and each of the two dosing drums $P_{\delta}$ (W):
$$
P_{\mathrm{y}} = P_{\mathrm{tp}} + P_{\delta 1} + P_{\delta 2}
$$
conveyor chain (scraper) speed, m/s; $\rho_{\kappa}$ - average density of the component in the dosing drum hopper, kg/m3; $\alpha_{n}$ - central angle between the drum slats, degrees; $D_{s}$ - diameter of the dosing drums along the generating line of the cylinder, m; $D_{h}$ - diameter of the dosing drums along the outer edges of the longitudinal slats, m; $\omega_{\delta}$ - angular speed of the dosing drum, rad/s; $\alpha_{\pi}$ - angle between the blades, degrees; $B_{n}$ - width of the longitudinal slit of the drum, m; $z_{\pi}$ - number of
longitudinal slats on the drum; $n_{\kappa}$ - rotational speed of the dosing drum, $s^{-1}$; $\tau_{c\partial}$ - ultimate shear stress of the material component in the chain conveyor, Pa; $h_{\kappa n}$ - total height of the component layer in the front hopper, m; $f_{h}$ - coefficient of friction of the component on the surface of the front hopper deck; $f_{6n}$ - coefficient of internal friction of the component in the first hopper; $h_{\kappa}$ - height of the component layer in the front hopper, m; $\sigma_{\kappa}$ - crushing stress of the component, Pa; $h_{o\kappa}$ - height of the separated component layer before the damper in the first hopper, m; $m_{c\kappa}$ - mass of the separated component by the chain conveyor scraper, kg; $m$ - mass of the separated component by the dosing drum slat, kg; $m_{\kappa \bar{\sigma}}$
mass of the main component in the middle and rear hoppers, kg [8]. The index «1» refers to the first dosing drum, the index «2» to the second.
The power of the soil removal machine $P_{\mathrm{y}\alpha}$ (W) is the sum of the following terms: the power consumed for horizontal soil movement $P_{ox}$ (W), the power required to lift the soil along the surface of the bucket (vertically) to the unloading conveyor $P_{ox}$ (W), and the power necessary for moving the machine and driving the unloading conveyor $P_{0}$ (W):
$$
P_{y\Delta}=P_{0}+P_{ox}+P_{oy}.
$$
Substituting the previously found expressions for determining each term into equation (3), we get:
$$
\begin{array}{l} P _ {y, \Omega} = P _ {0} + \nu \cdot \left\{\tau_ {\mathrm {p}} \cdot B \cdot \delta + 2 \cdot \sigma_ {\Omega} \cdot b \cdot h + \frac {\rho (B \cdot h \cdot v ^ {2} + b _ {k} \cdot h _ {k} \cdot v \cdot t \cdot g \cdot f _ {\mathrm {K}})}{c o s \gamma} + 2 \cdot \tau_ {\mathrm {o}} \cdot l _ {6 \Pi 0} \cdot s + \frac {2 \cdot \rho \cdot b \cdot h _ {0} \cdot v _ {0} \cdot g \cdot f _ {0} \cdot c o s \theta}{c o s \gamma} \right\} + v \cdot s i n \gamma \cdot \\\left(\rho \cdot B \cdot h \cdot v \cdot t \cdot g + \frac {\rho (B \cdot h \cdot v ^ {2} + b _ {k} \cdot h _ {k} \cdot v \cdot t \cdot g \cdot f _ {\mathrm {K}})}{\sin \gamma} + \frac {2 \cdot \rho \cdot b \cdot h _ {0} \cdot v _ {0} \cdot g \cdot f _ {0} \cdot \sin \theta}{\sin \gamma}\right), \\\end{array}
$$
Where, $P_0$ is the power required to move the machine itself during operation, in watts; $\tau_{\mathrm{p}}$ is the soil cutting stress, in N/m; $B$ is the bucket width (cutting edge width), in meters; $\delta$ is the thickness of the cutting edge of the blade, in meters; $\sigma_{\kappa}$ is the soil rupture stress, in N/m2; $b$ is the width of the soil layer, in meters; $h$ is the height of the soil layer, in meters; $\rho$ is the density of the removed soil, in kg/m3; $v$ is the translational working speed of the machine, in m/s; $b_{\kappa}$ is the width of the lateral surface of the blade, in meters; $f_{\kappa}$ is the coefficient of friction of the soil on the bucket surface; $\tau_0$ is the shear stress of the soil on the blade, in N/m2; $s$ is the height of the soil layer on the blade, in meters; $h_0$ is the height of the soil layer on the blade, in meters; $v_0$ is the speed of the soil movement on the blade, in m/s; $f_0$ is the coefficient of friction of the soil on the blade surface; $\gamma$ is the angle of inclination of the bucket surface, in degrees; $\theta$ is the average angle of the blade surface, in degrees [9].
Analysis of equations (2) and (4) shows that significant factors influencing the total power of the drive system of the combined layer include parameters such as chain speed, number of chain conveyor scrapers, angular speed of the drums, and the number of slats installed on them. The power required for the movement of the soil removal machine is influenced by the height of the removed soil layer, translational speed of the machine, and the angle of inclination of the bucket surface. These parameters can be identified as key factors affecting power optimization during the experimental phase of research.
## II. RESEARCH METHODOLOGY
For the experiment, two prototypes were fabricated: a combined layer (with a scraper conveyor length of 2.5 meters) and a soil removal machine. The research was conducted in the production conditions of a greenhouse complex. The methodology involved a series of two-factor experiments for each machine. Structural parameters (such as the number of scrapers and slats) were adjusted by installing the required quantity on the working elements, while the chain conveyor speed and drum rotational frequency were regulated by changing the sprockets on the drive shafts. The data were processed using regression analysis methods with the «Statistica» software package. Regression equations and corresponding three-dimensional graphical dependencies were derived. The adequacy of the regression equations in describing the experimental data was assessed using the Fisher's criterion.
## III. RESULTS AND DISCUSSIONS
Experimental research enabled the construction of a graphical dependency and determination of the influence of angular speed and the number of slats on the power of the drive system of the combined layer (Figure 1).
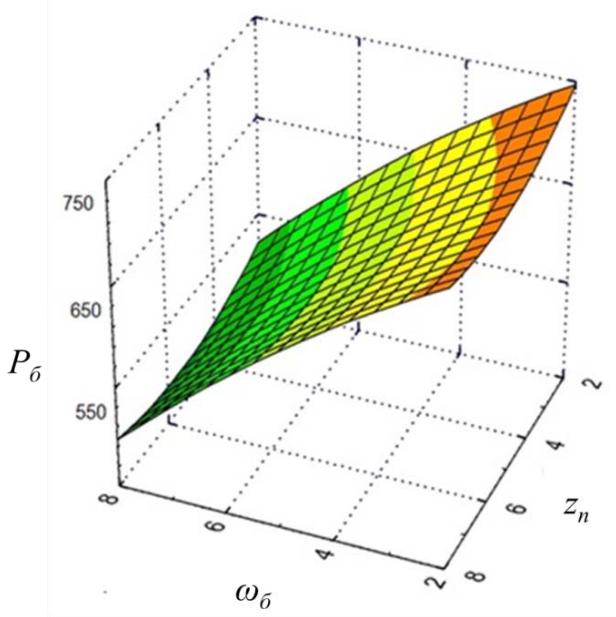 Figure 1: Dependence of the Power on the Drive Shaft of the Dosing Drum of the Combined Layer $P_{\delta}$ (W) on the Angular Speed $\omega_{\delta}$ (rad/s) and the Number of Slats $z_{n}$ (pcs) With increasing angular speed, the power on the drive shaft increases across the entire investigated range. Minimum power corresponds to high angular speeds. At low angular speeds, the power increases due to material buildup in the drum from the hopper. As angular speed increases, the mass of incoming material decreases, torque decreases, and required power drops.
The influence of the number of slats on power is less significant: maximum power is observed at $z_{n} = 2$, then it slightly decreases and stabilizes around $z_{n} = 6 - 8$. This is because the number of slats has little impact on the mass of material fed from the hopper, and the filling of the space between the slats remains relatively constant, resulting in almost unchanged power.
The analysis of experimental data allowed for the construction of a graphical dependency describing the power dependence on the drive of the scraper conveyor, based on the chain's translational speed and the number of scrapers (Figure 2).
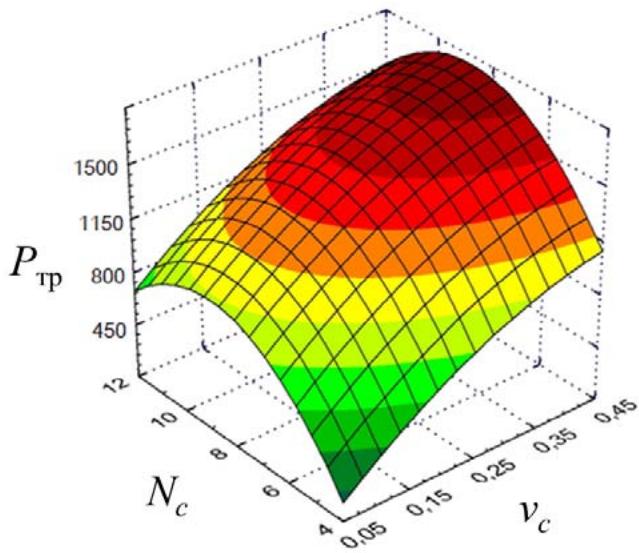 Figure 2: Dependency of the Power Consumed by the Scaper Conveyor Drive of the Combined Layer $P_{\mathrm{tp}}$ (W) on the Chain Speed $v_{c}$ (m/s) and the Number of Scrapers $N_{c}$ (pcs)
The obtained dependencies show that the change in power due to these parameters is similar to the change in torque but with greater intensity. As the chain speed $v_{c}$ with scrapers increases, the required power increases across the entire investigated range. For instance, with $N_{c} = 4$, increasing $v_{c}$ from 0.1 to 0.3 m/s leads to a rise in power from 1347 to 2975 W.
However, when $v_{c} > 0.35 \mathrm{~m/s}$, the rate of power increase slows down.
The influence of the number of scrapers on power follows a quadratic pattern: as the number of scrapers $N_{c}$ increases, power initially increases, reaches a maximum around $N_{c} = 6$, and then decreases. Increasing $N_{c}$ from 4 to 6 at a chain speed $v_{c} = 0.21$ m/s results in an increase in power from 1927 to 3532 W. This dependency is explained by changes in torque. With increased chain speed, the mass of moved components increases. However, at high speeds, components may not fully fill the space between the scrapers, leading to a reduced rate of power increase. Increasing $N_{c}$ from 2 to 8 also increases the mass of moved components, requiring additional power. If $N_{c} > 8$, the useful volume of the space between scrapers decreases, reducing the mass of components and consequently the required power.
The processing of experimental data has revealed the influence of the soil layer height and translational speed on the power expended for the movement of the soil removing machine. The obtained values form the basis of regression equation (5).
$$
P = 6443,37 - 479,61\cdot v - 84,651\cdot h + 17413,2\cdot v^2 + 162,321\cdot v\cdot h + 0,377\cdot h^2
$$
The analysis of the dependency (Figure 3) shows that the power expended for the machine movement increases with the speed. The change in power occurs linearly, with the growth intensity increasing as the height of the removed layer increases. For instance, at $h = 60 \mathrm{~mm}$, increasing the speed from 0.11 to 0.17 m/s results in a power increase from 4045 to 4792 W, which is an $18\%$ rise.
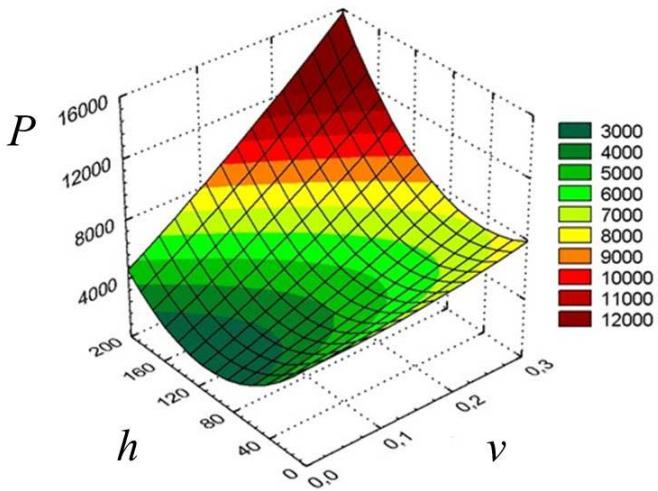 Figure 3: Dependency of Power Expended for the Movement of the Soil Removing Machine $P$ (W) on the Machine's Speed $\nu$ (m/s) and layer height $h$ (mm)
At $h = 100$ mm, increasing the speed within the same range results in an increase in power from 3980 to 4925 watts, or $23.5\%$. Similar behavior is observed at other values of the investigated parameters. Increasing both speed and layer height leads to an increase in the mass requiring movement, thereby increasing the required power. However, the influence of layer height on power is not linear: at low heights, the layer has almost no effect on power, but when $h > 80 - 100$ mm,
Power begins to significantly increase. Regression analysis and its graphical representation show that there is no optimum; power increases with parameter increases.
Additionally, the influence of the slope angle of the dumping surface and the machine's speed on the power expended for moving the soil removing machine was determined, and regression equation (6) was developed:
$$
P=5740,316+18869,3\cdot\nu-291,654\cdot\gamma-13732,64\cdot\nu^{2}+85,833\cdot\nu\cdot\gamma+5,438\cdot\gamma^{2}
$$
The power expended for moving the machine increases almost directly proportional across the entire range with increasing speed (Figure 4). This is due to the increase in the separated and moved mass of soil with increasing speed. At $\gamma = 20$ degrees, increasing the speed from 0.11 to $0.17\mathrm{m / s}$ results in a power increase from 4189 to 4950 watts. At $\gamma = 30$ degrees, increasing the speed leads to a power increase from 4160 to 5010 watts, or by $20\%$.
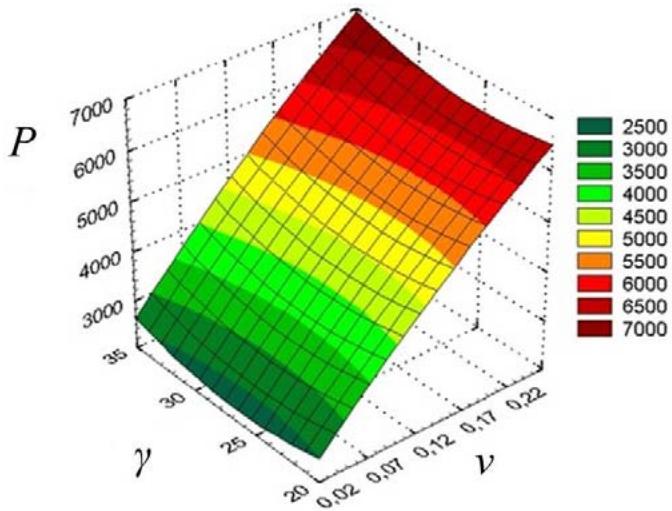 Figure 4: Dependence of power expended for the movement of the soil removing machine $P$ (W) on the machine's movement speed $v$ (m/s) and the inclination angle of the surface of the ejector $\gamma$ (degrees)
The influence of the surface slope angle is expressed in a more nonlinear manner. Power increases at smaller or larger slope angles. This change in power is explained by variations in traction force due to the slope angle. For $\gamma < 25$ degrees, the length of the working surface of the ejector increases, elongating the soil path and increasing resistance forces to the machine's movement. For $\gamma > 27$ degrees, the interaction between the ejector and the soil changes: soil accumulates in front of the ejector, creating additional resistance. Increasing the slope angle from 30 to 35 degrees at $\nu = 0.17\mathrm{m / s}$ leads to an increase in power from 5007 to 5549 W. The lowest power is achieved at $\gamma = 25 - 27$ degrees; deviation from these values increases power due to changes in traction force and interaction between the ejector and the soil.
## IV. CONCLUSIONS
The analysis of experimental results allowed us to establish optimal values for the operational parameters of the machines, where the power consumption for driving their mechanisms reaches its minimum.
For the combined paver, these parameters are: chain conveyor speed $\nu_{u} = 0.33 - 0.37 \, \text{m/s}$ and number of scrapers $N_{c} = 7 - 8$; angular velocity of dosing drums $\omega = 6.0 - 6.5 \, \text{rad/s}$ and number of blades $z_{n} = 6$.
For the soil remover machine, the optimal parameters are: bucket tilt angle $\gamma = 25 - 27$ degrees, translational speed $\nu = 0.2 - 0.25\mathrm{m / s}$, and depth of removed soil layer $h = 0.18\mathrm{m}$.
Thus, through the conducted experimental studies, we identified the influence of design and operational parameters on the power consumption of machines involved in the greenhouse soil preparation process. Furthermore, we determined rational values for these parameters that exert the greatest influence on the power required to drive the mechanisms of these machines.
Generating HTML Viewer...
Funding
No external funding was declared for this work.
Conflict of Interest
The authors declare no conflict of interest.
Ethical Approval
No ethics committee approval was required for this article type.
Data Availability
Not applicable for this article.
Aleksandr Vezirov. 2026. \u201cResearch on the Power Consumed by Drives of Machines for Working with Greenhouse Soil\u201d. Global Journal of Science Frontier Research - D: Agriculture & Veterinary GJSFR-D Volume 24 (GJSFR Volume 24 Issue D1): .
The quality of soil preparation for greenhouses is a key factor influencing crop yields in organic farming. Several machines perform various operations for working with greenhouse soil: a soil removal machine, a loader-mixer for soil components, and a machine for laying soil components. Theoretical research has established that the greatest influence on the power of the component laying machine comes from: the speed of the conveyor chain, the angular velocity of the dosing drum, the number of conveyor scrapers, and the number of drum slats. For the power of the soil removal machine, the influencing factors are: the size of the cut soil layer, the speed of the machine itself, and the angle of the bucket surface.
Our website is actively being updated, and changes may occur frequently. Please clear your browser cache if needed. For feedback or error reporting, please email [email protected]
×
This Page is Under Development
We are currently updating this article page for a better experience.
Thank you for connecting with us. We will respond to you shortly.