Unmanned aerial vehicles are a technology that has been used in many fields such as civil, military, industry and personal hobby in recent years and is developing rapidly in terms of technology day by day. In this study, human face detection and tracking application was carried out with a four-motor UAV. As an unmanned aerial vehicle, the DJI Tello EDU Drone has been used because it can be programmed with several different software languages, cheap cost, and material quality. The application was carried out in the PyCharm environment using the Python software language and OPENCV version 4.3.0 due to the availability of easy-to-learn and source studies. The OPENCV library was used to perform human face detection and tracking in the application. This process was carried out as the process of deciding and following without any selection process by the user that the object to be detected in the real-time image obtained from the frame of the fixed camera in the UAV is a human face. Dependent factors were evaluated in order to obtain the desired results in indoor and outdoor flights. As a result, human face tracking application was carried out autonomously in this study.
ÖZ- insansiz hava araçlar son yllarda sivil, askeri, sanayl, kisel hobi gibi birçok alanda kullanimi bulunan ve herngün teknoljik anlamda hazlı gellogen bir teknolojidir. Bu calismada dört motorlu insansiz hava araçlar ile insan yüz tespit ve takibi uygulaması gerekleştilmistr. Insansiz hava araci olarak DJI Tello EDU Drone, birkac farklı yazilmili dili ile programlanabilir olması, ucuz maliyeti ve malzeme kalitesi özelliklerine sahip olmasindan dolay kullanilmistr. Uygulama, kolay ögrenilebilir ve kaynak calismalarin bulunmasindan dolay Python yazilim dili ile OPENCV 4.3.0 versiyonu kullanilarak PyCharm ortaminda gerekleştilmistr. Uygulamadaki insan yüz tespiti ve takibi islemigi gerekleştilmesti icin OPENCV kutuphanesi kullanilmistr. Insansiz hava aracinda bulunan sabit kameranin kadrajindan elde edilenGPCEK zamanl gürntüde tespit edilecek nesnenin insan yüz olduguna kullanici tarafindan herhangi bir seçme islemi olmaksizin, karar vermesi ve takip etmesi islemigi gerekleştilmistr. Gerekleştilen icmek'an ve dis mekan uçuslarnda istenilen sonçlarin alinması icin bagımlı olunan etkenlerdehyerendilirmistr. Sonuc olarak bu calismada otonom olarak insan yüz takibi uygulaması gerekleştilmistr.
## I. GIRIS
Insansiz hava araci (iHA); icerisinde kendisini kontrleden pilot ve taşimak amaciyla yolcu bulundurmayan, amacina uygun olarak ekipman(video kayit kamerasi, fotograf kamerasi, gps sensorü, vb.) bulunduran uzaktan kontrl ve/veya otomatik uçusgerektekleştrebilen bir çeşit uçaktır [1]. iHA sivil, bilimsel, askeri vb. birçok alanlarda kullanilmaktadir. Bu alanlardaki kullanımlar gerek ülkemizde gerekke)dunya da Hzla artmaktadir. Artan bu kullanımlarin temel nedeni olarak kullanildiklar alanda (örneğin arama-kurtarma)yüksek.Doğruluk, maliyet ve zaman tasarrufu saglamasi gastroilermektedir [1].
IHA'nin kullanim alanlarinin bu denli genis olmasi, görtüisleme teknolojisinin alt konularindanolan nesne takibi konusunun ortaya Çikmasina nden olmustur. Görtüisleme (image processing) ve nesnetakibi (object tracking) konular bilgisayarlı görme (computer vision) teknolojisinin alt dallari olarak kabul edilmektedir. Nesne takibiISTA askeri alanda olmak üzere IHA'larin kullanildikları buttun alanlarda calismalarin yapildigi onemli bir alandir [2]. Nesne takibi, kameradan elde edilen görtü dilizleri veya videolardaki hareketli nesnelere ait çeştili (hiz, konum, sekil, renk, isik etkisi vs.) bilgilerin tam olarak belirlenmesi ilemidir [3].
Nesne tespiti ve takibi görtü istlemeteknolojisinünemli konularindan biri konumundadir.Örningradar,yüz tanima ve güvenlik systemleri, radyoloji (tomografi vb.) gibi uygulamalar görtü istleme teknojisinin yaygin olarak kullanildigiuygulamalardandir [4].Ayrica uydulardan alinan görtüerde nesne tanilmama ve siniflandirma uygulamalarcoğrafi alanlarin siniflandirilması amaciyla kullanilmaktadir.
Nesne tespiti ve takibi konusu, endustriyel alanarda urun kontrolü, hata tespiti, hatali urünlerin ayrilması gibi birçok konuda da calismalar yapilmasina olanak sağlamaktadir. Bu calismalarGORuntü islemeteknolojisinin endustriyel alanarda kullanilmasinin ne denli onemli oldugunu ortaya koymaktadir. Nesne tespit, takip, sayim vb. islemlerin erfolgkleştilirmesi icin yapilan calismalarda kullananan goruntü isleme teknolojisi, yapay zekâ teknojilerine de destek vermektedir. Yapay zekâ teknojisi ile kullanilmasi saysinde endüstriyel alanda özellikle robotik uygulamalarin çesitliliğine katki-SAğlamaktadir. Bu iki teknojinin butünleşmis olarak calisabilmesi günlukypassam dahil olmak üzere birçok alanda hayatı kolaylustirmaktadir.
Günümüzde güvenlik systemleri yüz konusu olduğunda,GORuntü ileme teknoljisi;cok buyuk oneme sahiptir. Güvenlik systemerinde en onemli amaç gozetim ileminin yapilmasidir.Yuksek güvenlik gerektiren alanlarin (ornegin havaalanı, buyukelçilik vb.) gozlemlenmesi icin kullanilmaktadir. Bu systemler güvenlik gerektiren alanlarda giriş-çkışapan insanlarin takibi,sahipsiz bagaj vb.nesnelerin tespit ve takibi gibi ilemlerde kullanilarak olusabilecek olumsuzluclarin onüne gezilmesine olanak sağlamaktadir [3].
Gözetim amaçlı kisi ve nesne takibi kritik oneme sahip bölgelerde kisa surede, hizl ve güvenli bir sekilde seksilde-SAğlanabilir. Hareketli atan ve/veya nesne takibi, sabit nesne ve/veya atan takibi konusu ile karşilastirildıyinda daha karmalıkbir problemdir. Açık alanarda yapilacak takip uygulamalarinda olumsuz hava kosullari vb. nedenler kamerada nesne ve/veya atan algisinin azalmasina ve güruntü isleme teknojisi konusunda bazı problemler sebep olmaktadir. IHA'lar atan yogunluğunun fazla oldugu alanlarda nesne tespiti (örnégin tren istasyonlari, otogar vb.), hareketli trafikte araç tespiti gibi pek;cok uygulama alaninda kullanilmaktadir [5]. Güvenlik uygulamalarinda onemli bir böüm ile parmak izi, iris,yüz tanıma sistemleridir. Bu sistemlerin etkili bir sekilde kullanilmasinda atan yüz tespiti cok buyuk oneme sahiptir. Insan yüz tespiti, gürntü isleme teknojisinin sağladiği birçok avantaj ve faydalardan sadece birdir. Bu fonksiyon gürntü isleme kutuphaneleri kullanilarak yüksekdoğankukta sonuc veren sistemlerde kullanilmaktadir. OPENCV bu kutuphanelerden olup gürntü isleme uygulamasınin daha az komut satiri ile yapilabmesi vedaughter sonuc vermesine olanak-SAğlamaktadir.
Bu calismmanin insan ve/veya nesne tespit ve takibi konularinda literature katki saglayacaigi duşünulmektedir. Bu baglamda özellikle ulusal ve uluslarası açık kaynak projelerine katki saglamasi beklenmektedir. Buna ek olarak nesne ve/veya insan takibi yapabilen IHA projesi kapsaminda ülkemizde az sayida calisma olması; ürünün ticarileştilmesi ve gelistirilebilir bir ürün olarak patent basvurusu yapilmasini mümkün kilmaktir.
Bu calisma beş böllumden olusmaktadir. Ikinci böllumde görtü isleme, nesne tespit ve takibi alanlarinda yapilan.Onceki calismalar yer almaktadir. Üçuncü böllumde insansiz hava araçları hakkinda ayrintili bilgi verilmistir. Döruncü böllumde, calisma kapsaminda kullananan görtü isleme algorimasi hakkinda bilgiler ve calismann isleyis admlari anlatilmistir. Son bolumde ise yapilan calismartin onemive sonucuna iliskin bir degerlendirme yapilmistir.
## II. LITERATÜR CALIŞMASİ
Literaturde insansiz hava araclare,GORuntu isleme,nesne tespit ve takibi teknojilerinin kullanildigi cesisiti uygulamalar bulunmaktadir. Coskun [3] yaptigi calismada dort rotorlu AR.Drone ile surekli uyarlamali ortalama kayma algoitmasi kullanarak kapali alanda hareketli nesne takibi uygulaması gerekleşirmistir.
Peker ve Zengin [6] hareket tespit algorithmmalarindan olan 1kara plan fark yontemi algorimtasini kullanarak hareketli nesne tespit ve takibi uygulamasini gerceklestirmistir. Bu uygulama ile belirtilen bir alanda izinsiz giris tespiti amaclarmistir.
Meduri ve Telles [7] calismalarinda Haar-cascade algoitmasi ile akilipark sistemi calismasi ortaya koymustur. Bu system, alinan goruntüdeki alandaki araclarin ve bosolan park yerlerinin tespiti islemini gereklestirmistir.
Hareketli nesne ve/veya insan takibi uygulamari akla ilk olarak guvenlik sistemlerini getirse 'de, teknoLOjik urun geliistirmeler alaninda buyuk oneme sahiptir. Oncu [8] yapti calismada cansiz bir mankene yerlestirilen kameralar, ses algilayiclar ve hareket motorleri ile aynianda hem goruntu hem de ses isleme teknoLOjilerini kullanarak hareketli nesne takibi calismasini ortaya koymustur. Bu calisma ayni zamanda insansi robot uygulamalarinin temelini olusturmaktadir.
Bayram [9] metal seksörände SAC kesim ilemlerinden sonra ortaya Çikan ürnde bulunan dairesel boşluklarin görtündu islemeteknolojisi kullanilarak belirtilen hata toleransı icerisinde olup olmadıyınin kontrol edildigi ve böylece hatali ürünlerin otomatik ve%Hizl bir sekilde tespit edilmesi ilemeleriniGPCsekleşirmistir.
Kadiroğullari vd. [10] calismalarinda yapay sekâ ve görtü isleme teknojilerini buttunleşmis bir sekilde kullanarak otonom bir trafik sinyalizasyon calismasi ortaya koymuslardir. Bu calisma ile trafigin yogun oldugu noktalandaki araç ve insan sayilarina gore trafik isiklarinin en uygun performans ile otonom sekilde calismasiGPCsekleştilmistir.
Solak ve Altinisik [11] yaptikları calismada ortamda bulunan finden meyelerinin,görtü ileme teknojisi kullanarak hem tespit hem de kucuk, orta ve buyuk olarak uç siniflandirma ilemiGeorgelestirmişir.
Yiğit ve Uysal [12] yaptiklari calismada nesne tabanlı siniflandirma detay Çikarimi kullanarak insansiz hava araci ve uydudan alanan gürüntülerden yol tespiti yapmistir.
Yildiz ve Kavzoğlu [13] calismalarinda Quickbird ve Landsat uydularindan alinan görtüTLerin nesnetabanl sinflandirma yontemini kullanarak Trabzon iline ait görtüTLerden arazi ortusünn sinflandirilmasi calismasini ortaya koymuslardir. Bu calismada orte seviye islemler bolümunde uygulanan segmentasyon adminin kalitesinin siniflandirmaninogruluğunu onemli duzyde etkiledigi sonucu ortaya Çikmiştr. Iki farkı uydudan alinan görtüntülerdeki Çozünurlük farkınin siniflandirma islemindeki kaliteyiogrudan etkiledi ve ne kadar onemli oldugu görtulmustür.
Apache Hadoop, * $\text{捱} \cup$ veri kümelerinin ilelenmesini-SAglayan açık kaynak kodlu bir platformdur. Apache Hadoop, yapilandirilmış, yari-yapilandirilmış ya da yapilandirilmamış buyuk veri kümelerin ilelenmesi ve depolanması ilemleri icin maliyeti dusuk bir sitem-SAglar. Kachin [14] calismasinda Apache Hadoop platformu Üzerinde Haar-Cascade algoitması kullanarak insan yüz tespit uyugulaması ortaya koymustur.
Tekin [15] yaptiç calismada ev ortamindaki Çocuğun hareketlerinin izlenmesi ve belirlenen durumlarin olusmasi halinde ebeveynlerin ceptelefonlarina alarm bildirilmesi sistemi n gelistirmistir. Bu calismada kalman filtresi kullanarak pris, istici vb. seçilen tehlikeli bölgelere Çocuğun yaklasmasi gibihareketlerin belirlenen esik seviyelerin dincaçikmasi durumunda alarm sisteminin calismasiGPCkeleştilmisdir.
Turhan [16] ortalama kayma yontemi ile iki farkli görtünde takip edilen nesnenin ani hareketlerini ve nesnenin engele maruz kaldiktan sonra takibiniGPCkeklestirmistir.
Aktas [17] calismasinda farklarin mutlak degerlerinin toplami metodunu kullanarak islenmek istenen imgenin satir ve sutunlarinda ilerleme adimi darindaki islem yukunu azaltmistr. Nesne tespit islemi yuksek dokruluk orani ileGPCkelestiilmistr.
Şahin ve Oktay [18] yaptiklari calismada ZANKA-II isimli sabit kanatlı IHA tasarlamıştir. Kanat uçların hareket edebilen bir system kontrol etmistir. Bu calisma kanat uçlarindaki menteşeli bir tasarın serv osystem yardimi ile kontrol edilmesi esasin dayanmaktadır. Kanat uçları kontrol edilerek uzgün buttün sahalarinda yuksek verim elde edilmıştir.
Ajoy vd. [19] ise siluet tabanl nesne takip yontemi kullanarak görtuntüler icerisinde tespit edilecek nesne siniralinç czilerek sonraki framelerde nesnelerin aranmasi ve tespiti isleminiGPCkelestirmistir.
## III. INSANSIZ HAVA ARACLARI
iHA; fiziksel olarak icerisinde insan bulundurmayan uzerinde video kamera, fotograf makinesi, ceşitli sensörler vb. gibi araçlar bulunan bir ceşit uçaktır [20]. iHA uzaktan ve/veya otomatik olarak hareket edebilmektedir. Gümümüzde gelügen teknojisi saysinde iHA Çok genjis kullanım alanlarina sahiptir. Askerı alan basta olmak üzere ticari, sivil, bilimsel, hobi gibi alanlarda aktif bir sekilde kullanilmaktadir. Doğal afetler, trafik denetimleri, nesne ve/veya insan tespit takipleri vb. olaylarda insan hayatinin kolaylasmasina olanak-SAglamaktadir [2]. iHA kullanım amaclarina gore sivil ve askerı olmak üzere iki ana sinifa ayilmaktadir. Askerı kullanım alanlari Tablo 1' de sunulmustur [21].
Table 1: Insansiz hava araçları askeri kullanım alanları [22].
<table><tr><td>Keşif/Gözetleme
Destegi</td><td>Saldırı</td><td>Elektronik
Savaş</td><td>Hedef Benzetimi</td><td>Özel Gürevler</td></tr><tr><td>Taktik Saha Keşif /
Gözetleme</td><td>İç güvenlik</td><td>Hedef Üçak</td><td>Sinyal İstihbaratı</td><td>Haberlege me Destegi</td></tr><tr><td>Stratejik Keşif /
Gözetleme</td><td>Yakın Hava
Destegi</td><td>Sahte Üçak</td><td>Radyo Elektronik
Harp</td><td>Mayın/Patlaykı Tespit</td></tr><tr><td></td><td>Hava Savunma
Sistemlerinin
İmhası</td><td></td><td>Muhabere
Elektronik Harp</td><td>Kimyasal, Biyolojisik,
Radyoaktivif, Nükleer
Tespit</td></tr></table>
Tablo 1(devam): insansiz hava araçları askeri kullanim alanlanı [22].
<table><tr><td>Keşif/Gözetleme
Desteel</td><td>Saldırı</td><td>Elektronik
Savaş</td><td>Hedef Benzetimi</td><td>Özel Gürevler</td></tr><tr><td></td><td>Hava Sahası
Savunma</td><td></td><td>Önleyici Elektronik
Harp</td><td>Kentsel Harp</td></tr><tr><td></td><td></td><td></td><td></td><td>Çoklu İHA Görevi - Kol
uçusu ya da geniş alan
güzetlemesi</td></tr><tr><td></td><td></td><td></td><td></td><td>Deniz Karakol /
Denizaltı Savunma Harbi</td></tr><tr><td></td><td></td><td></td><td></td><td>Kargo Taşa</td></tr><tr><td></td><td></td><td></td><td></td><td>Arama-Kurtarma /
Lojistik</td></tr></table>
### a) Sabit Kanatli Insansiz Hava Araçlari
Sabit kanatli insansiz hava araçları genel yapiş ve kanat görünümü ile).(uçaklara benzemektedir. Sahip oldugu sabit kanatlar sayesinde yüksek Hz, yüksek irtifa, uzun uçus sürelerine sahiptir. Uçus).(duymaktadir. Ayrıca bakim ve onanimin n daha kolay olması kullanım aç,isindan).(en onemli faydalardandir [23].
### b) Doner Kanatli Insansiz Hava Araçlari
Doner kanatlinsansiz hava araclari; dikey safta baglilan kanatlarin yerekimi kuvvetine karst daha buyuk bir kuvvet uygulayarak uus gerseklestiren hava araclaridir. Kanatlarin saftlara bagloldugu sisteme rotor adi verilir. Doner kanatllinsansiz hava araclari degisken rotor sayilarina sahip olabilmektedir. Hafif malzemeler tercih edilerek uretilir. Bu hafiflik manevra kabiliyetlerinin yuksek olmasini saglamaktadir. Uus hizi olarak yuksek hizlara ulasamamakla birlikte havada asili kalabilme, uc boyutlu hareketler yapabilme, piste gerek duymadan uygun bircok alandaninis-kalkis yapabilme ozelliklerine saiptirler. Bu ozelliklerinden dolayi genellile keşif gorevlerinde kullanilmaktadirlar. Gerseklestireceigi gorevlere gore pervane sayları degiskenlik gostermektedir [24].
### c) Insansiz Hava Araçlarin Ülkitemizde Siniflandirilmasi
insansiz hava araçları sahip olduklari birçok özelijklere gore siniflandirilabilir. Dünyada insansiz hava araçlarınsiniflandirilmasinda kullanıan evrensel Özellik iHA'nin kütlesi olarak kabul edilmektedir. Gereşleştreceşi,gorev ve amaçlar doğrultusundaçok kucuk boyutlardanbirçokfarklıboyutarda iHA'lar üretilmektedir. Boyutlarladoğan ortılı Olarak iHA'larin kütleleridehyşkenlik goctermektedir. Ülkemizde insansiz hava araçlarınsiniflandirilması Sivil Havacilik Genel Muddurlugu (SHGM) tarafindan yapilmaktadir. Bu siniflandirma yapilirken insansiz hava araçların k;tle değerleri kullanilmaktadir.Tablo 2'de SHGM'nin iHA siniflandirma tablosu sunulmustur [25].
Tablo 2: SHGM IHA siniflandirmasi [25]
<table><tr><td>SINIF</td><td>KÜTLE</td></tr><tr><td>İHA0</td><td>500 gr (dàhil) – 4kg aralıgium</td></tr><tr><td>İHA1</td><td>4 kg (dàhil) – 25 kg aralıgium</td></tr><tr><td>İHA2</td><td>25 kg (dàhil) – 150 kg aralıgium</td></tr><tr><td>İHA3</td><td>150 kg (dàhil) ve daha fazla</td></tr></table>
Ulkemizde SHGM'nin siniflandirmalarina gore ayrilan iHA'lari kullanabilmek SHGM tarafindan onayligrigitim kurumlarindan alinacak egitim sonucunda sahip olunacak pilotluk lisanslarina gore kullanim saglanabilmektedir.
## IV. MATERYAL VE YONTEM
Bu calismada görtü istleme teknojisini kullanabilmek icin OPENCV kutuphanesinden yararlanilmşir. Bu baglamda insan yüz tespiti islemi icin OPENCV kutuphanesinin icerisinde barindirdigi birçok algoitmadan birisi olan Haar-Cascade sinflandircisi kullanilmşir. Sinflandirci, doğruluk oranın yüksek olması ve kolay uygulanabilir olmasindan dolayı tercih edilmşir [26]. Haar-Cascade sinflandircisinözellikleri kullanilarak iHA'nin kamasindan alinan görtütdeki insan yüzün ntespit islemi ve sinflandirma islemi yapilmşir. Tespit islemi sonrasinda iHA'nin camera kadrajina giren insan yüzün nkan camera kadrajindan Çikanaka kadar ki surendeGPCEK zamanl olarak takip islemiGPCKleştilirmşir. Uygulamaya ait akı semasi Sekil 1'de, calismada kullananan IHA isecikil 2'de sunulmştur.

Sekil 2: DJI Tello EDU insansiz hava araci
Uygulama kodlarinu uygulanabilmesi icin ücretsiz bir butunleşmis gelişirme ortami (IDE) olan PyCharm uygulaması kullanilmşir. Proje yapim asamasinda kullananan teknojiler ile alakali toplanan her turlü bilgi, belge, egitim gibi unsurlara kolay ve hizlbir sekilde ulasima durumu ve uygulanabilirligi projede kullananan teknojilerin seçiminde etkili olmştur. Çalisma temel olarak iki adimda erfolçkelestirilmşir.
### a) Iha Kamerasindan Alinan Goruntude Insan Yuzu Tespiti
Haar-Cascade algorithmin haar özellikleri kullanıralak insan yüzündeki alanın renkışı ve yogunluğuna®, olarak insan yüzündeki organlari tespiti yapilaram,göruntüde insan yüz olup olmadı tespit edilmistir. Haar özelliklerin kullaniminda siniflandınin sahip oldugu,dikdörtgenlerin altindakalan bölgelerin pikel seyogunluk farklari, yuz üzerindeki bölgeleri ayrı ayrı tespit edilmesine olanak,saçlayarık insan yüzündeki goz,burun gibi organlar tespit edilir, boylece insan yüz,diger objelerden ayırd edilir. Alanlararasindaki farklara®, burun gibi organlar tespit edilir, boylece insan yüz,diger objelerden ayırd edilir. Alanlar arasindaki farklara®, burun gibi organlari tespit edilir, boylece insan yüz,diger objelerden ayırd edilir. Alanlar aloritmanı Özellikleri ve,isleyis adımları sirasıyla asagidaki gibidir.
## i. Haar Özelliklerin Hesaplanmasi
Hesaplama, görtunüdeki buttun bölgelerin pikel yogunluklarin toplanmasi ve bu toplamlarinarasindaki farklarin bulunmasi seklinde yapilmaktadir. Haar özelliklerinden Örnekler Sekil 3'de sunulmustur.
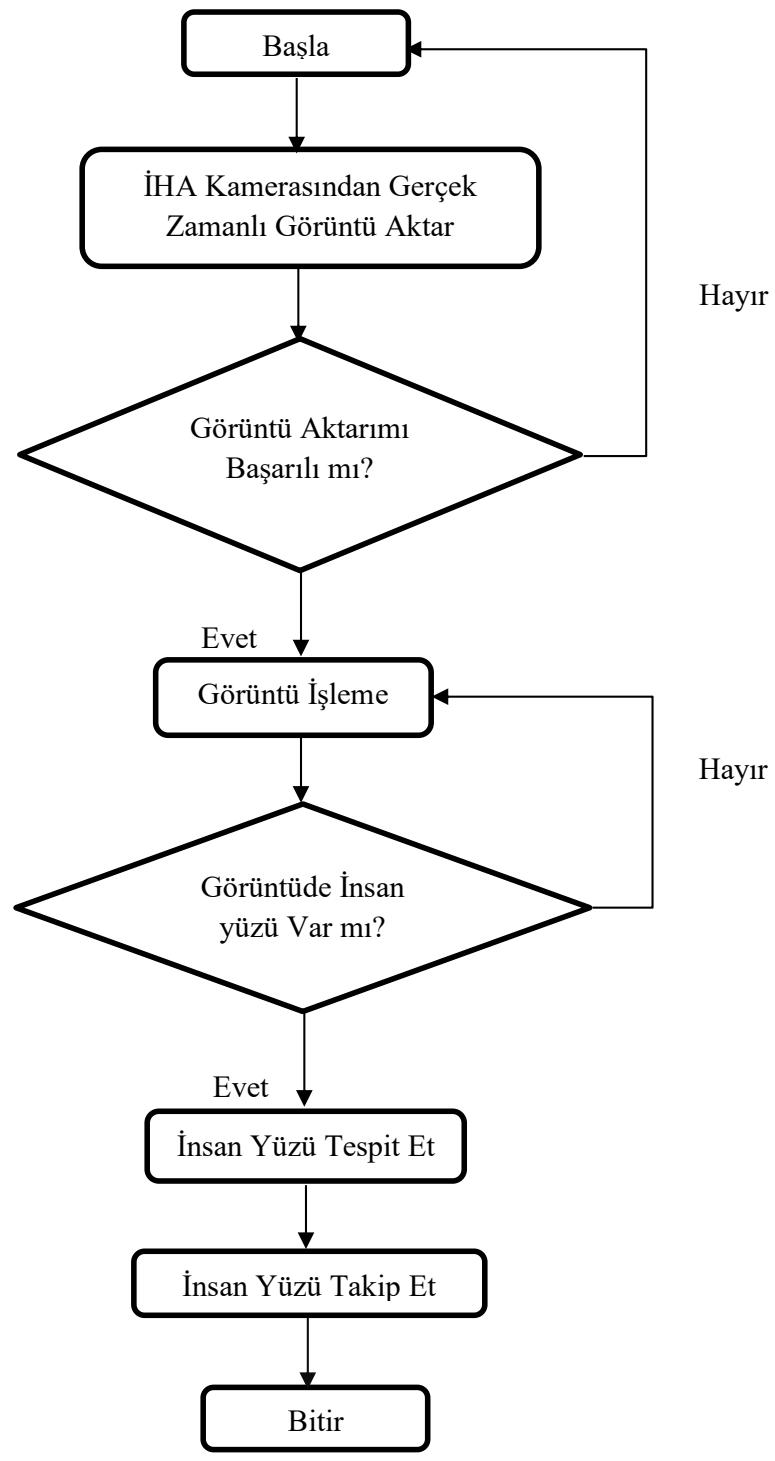 Sekol 1: Akis semasi
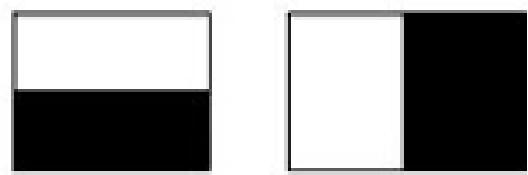
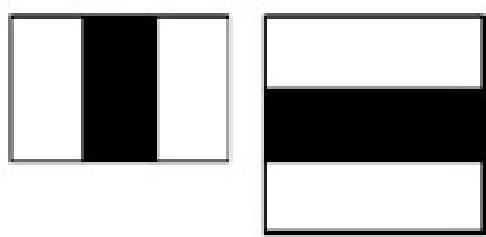
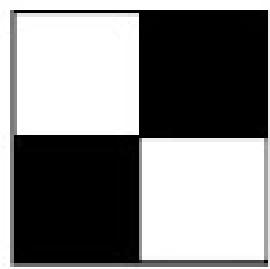 §ekil 3: Köse özellikleri, hat özellikleri, dört dikdörtgen özellikleri [28].
Haar Özellikleri kullanıralak yüzükGPCntlüderde kullanilmasıperformans aç,isindeandezavantajldir. Bu yüzden integralGPCntlü asamasıburada devreyegirmektedir.
## ii. Integral Görtunün Oluşturulmasi
Integral görtü olusturulmasinin esas amaci haar özelliklerinin hizlandirilmasin sägamaktir. Her pikselde hesap yapmak yerine alt dikkörtgenler olusturul ver bu dikkörtgenlere dizi referanslari verilir. Integral görtü denklemi, Denklem (1)'de sunulmustur.
$$
i i (x, y) = \sum_ {x ^ {\prime} \leq x, y ^ {\prime} \leq y} i \left(x ^ {\prime}, y ^ {\prime}\right) \tag {1}
$$
Integral görtündüde hesaplanan ve kullanilmasi gerekenhaarözelliklerekararverilmesigerekmektedir. Bu aşamada ise Adaboost devreyegirmektedir.
## iii. Adaboost Kullanimi
Adaptive Boosting'in kisaltmasi olan AdaBoost, Yoav Freund ve Robert Schapire tarafindan formule edilmis bir istatistiksel siniflandirma meta algorithmisdir. Performansi artirmak icin diger bircok ogrenme algorithması turüyle birlikte kullanilabilir. Adaboost, esasen en iyi özellikleri seçer ve siniflandiricari bunlari kullanmaları icin egitir. AdaBoosthaar-cascade algorithmasin nesneleri algilaması icin kullanabilecegi bir "guclu siniflandirici" olusturmak icin "zayif siniflandiricar" kombinasyonunu kullanir [29]. Haar özellikleri ile burun/seme ilemi görsel görüntüsü Şekil 5'de sunulmuştur. Yüzündeki yanak bölgesinin renk durumunun burun bölgesindekiye göre daha açık renkte olması ile yüzdeki organ sınıflandırılması erfolçkleştirilir. Böylece yüzdeki değişikliklerin tespiti erfolçkleştirilir.

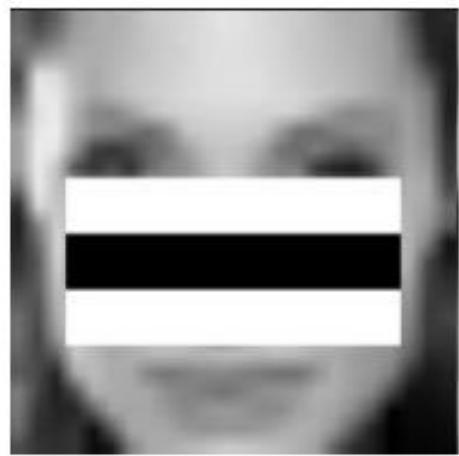 Sekil 5: Haar özellikleri ile burun/seçimi [27].
IHA kamerasinda alinan gerek zamanli görtüde insan yuzu tespit isleminin görtüssekil 6'da sunulmustur.
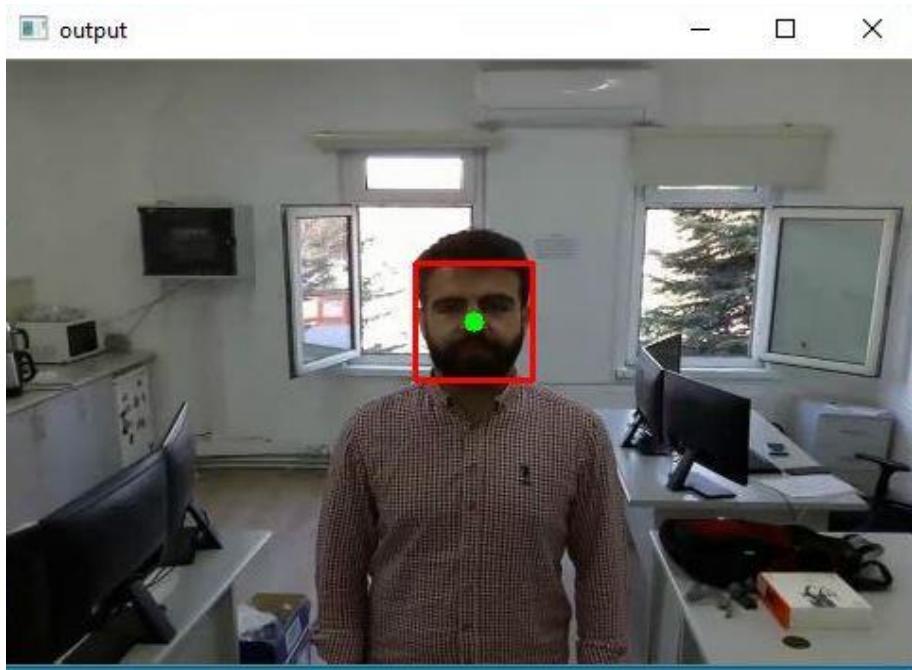 Şekil 6: İHA kamerasindan alınan.Sincek zamanlı görtüdeki yüz tespiti.
### b) Tespit Edilen Insan Yüzünün Gergek Zamanli Takip Edilmesi
İnsan yüz tespit ilele uygulandiktan sonra, tespit edilen insan yüzün nıgcik zamanlı olarak yer degişimlerin takip edilmesi ilemiGeorgekleşirilmistir. Takip ileminin yapildigi kapalı ortam ve takip ileminGeorgekleştiğini gösten,göruntü Şekil 7'de sunuldugu gibidir.
 Şekil 7: Kapali ortamda insan yüz tespiti ve takibi ilemi erfolgendeşleştirilmesi
Kapali ortamdagereklestirilen uçus bestehtile uygulanmistir. Dis ortamda uçusu olumsuz anlamda etkileyen unsurlarin güneş isigünin parlakligi ve rüzgár hizi oldugu belirlenmistir. Haar-Cascade algorithmin insan yüzündeki bolgesel parlaklik farklarini kullanarakgereklestirmesi, güneş isigünin yokunluğu karsisinda istenilen sonucları vermekte zorluk;cekmesine neden olmaktadir.IHA gece uçuslarinda bestehtil bir tespit ilemi gereklestrememistir. Bunun sebebikameranin gece gürusü özelligine sahip olmaması olabilir.
## V. SONUÇ VE DEGORLENDIRME
Bu makalede, doner kanatli bir IHA ile otonom sekilde hareketli insan yuzu tespit ve takibi uygulamasi onerilmisir. Uygulama gelistirme suresince nesne tespit ve takibi, görtuntü isleme teknolojileri ve uygulama yontemleri araşirilmisir. Insan yuzu kamera kadrajindan Çktınde vya insan yuzu ile kamera arasaşa bir nesne girdiginde takip islemi basarisiz olmaktadir. Insan yuzünncn kamera kadrajina tekrar girmesiyle yeniden baslamaktadir. Insan yuzu tespit ve takibi durumunuGPCklesmesi icin kamera kadrajinda herhangi bir insan yuzu olmasi yeteri olacaktir. Bu makaleden elde edilen sonuclar, IHA uygulamaları gelistirilmesi açisindan ükemizdeki literature katkışyla önemlidir. Bu makaleden elde edilen sonçlar sayesinde makine ögrenmesi teknoljisi de kullanilarak İHA'ya ögretilen insan yüzünü takip edebilen bir system erfolçkleştilmesidehyerlendirilmistir. Değerlendirilen bu/systemgünümuz Türkiye'sinde, seçilen kırsal araziler,şehir ici bölgeler, kalabalıgün yüzün olduğu bölgelerde suçlu tespit ve takibi:yapanystemler gelistirilmesineolanak saglayacaktir.
392
Generating HTML Viewer...
References
30 Cites in Article
N Can,M Kahveci (2017). İnsansız Hava Araçları: Tarı̇ hçesı̇ , Tanımı, Dünyada ve Türkı̇ ye dekı̇ Yasal Durumu.
Y Merç,C Bayılmış (2011). Dört Rotorlu İnsansız Hava Aracı (Quadrotor) Uygulaması.
C Musab (2015). Dört Rotorlu İHA ile Sürekli Uyarlamalı Ortalama Kayma Algoritması Kullanılarak Hareketli Nesne Takibi.
K Hanbay,H Üzen (2017). Nesne Tespit ve Takip Metotları : Kapsamlı Bir Derleme.
M Kaya (2012). Döner Kanatlı İnsansız Hava Aracı Kullanarak Bölgesel Gözetim Amaçlı Kişi veya Nesne Takibi.
M Peker,A Zengin (2011). Gerçek Zamanlı Harekete Duyarlı Bir Görüntü Tanıma Sistemi.
P Meduri,E Telles (2018). A Haar-Cascade Classifier Based Smart Parking System.
Ayşe Serin,Dilek İşlek,Fatih Akyüz,Fatma Çavuş Yonar,Fatma Yüksek,Hüsniye Canan,Itır Erkan,Kubilay Kınoğlu,Mehmet Korkmaz,Mustafa Ürün Ay,Nazlı Hölümen,Ömer Karataş,Özlem Bülbül,Özlem Kolusayın,Sotiri Kalfoğlu,Şeyda Özcan,Ufuk Yüksek,Umut Kara,İsmail Değerli (2014). Adli Genetik Uygulamaları.
Seda Altuntaş,Mihriban Korukluoğlu (2019). GIDA İŞLEME TESİSLERİNDE LISTERIA MONOCYTOGENES VE MÜCADELEDE YENİ YAKLAŞIMLAR.
Gökhan Kadiroğullari,Bekir Aksoy,Hamdi Sayin,Melek Ömür (2020). ARIMA YAPAY ZEKA YÖNTEMİ KULLANILARAK ISPARTA İLİNDEKİ ÖRNEK BİR KAVŞAK İÇİN ARAÇ SAYISI VE ARAÇ GEÇİŞ SÜRELERİNİN TESPİTİ.
Serdar Solak,Umut Altinişik (2018). Görüntü İşleme Teknikleri ve Kümeleme Yöntemleri Kullanılarak Fındık Meyvesinin Tespit ve Sınıflandırılması.
Abdurahman Yiğit,Osman Orhan (2019). Multispektral İHA Görüntüleri Kullanılarak Nesne Tabanlı Görüntü Analizi ile Ağaç Tespiti ve NDVI Tabanlı Bitki Sağlığı Analizi.
M Yildiz,T Kavzoğlu Nesne Tabanlı Sınıflandırma Tekniği İle Arazi Örtüsünün Belirlenmesi : Quickbird ve Landsat Örneği.
K State (2020). Detection of Faces from Images Using Haar Cascade Classifier.
E Dandan (2010). Ev Ortaminda Çocuk Güvenliği Amaçlı Akıllı Gözetleme Sistemi.
M Turhan (2016). Kayma Tabanlı Nesne Takibi.
H Aktaş (2015). Şablon Eşleştirme Yöntemi İle Nesne Takibi ve Yüksek Hızla Fpga Geçekleşmesi.
Hüseyin Şahin,Tuğrul Oktay (2019). Başkalaşan Kanat Ucu Tasarımı ve Avantajları.
Ajoy Mondal,Susmita Ghosh,Ashish Ghosh (2016). Efficient silhouette-based contour tracking using local information.
Hacı Yilmaz,Ömer Mutluoğlu,Ali Ulvi,Aydan Yaman,Süleyman Bilgilioğl (2018). İnsansız Hava Aracı İle Ortofoto Üretimi Ve Aksaray Üniversitesi Kampüsü Örneği.
H Bilgehan,M Selçuk,M Fakültesi (2016). İnsansız Hava Araçları Lidar Etkileşimi.
A Yılmaz (2018). Eşkişehir İzmir Uçuş Bağlatısının Talep Sürdürülebilirliğinin Araştırılması.
S Türkseven,M Kizmaz,A Tekin,E Urkan,A Serim (2016). Tarımda Dijital Dönüşüm; İnsansız Hava Araçları Kullanımı.
Sıtkı Öztürk,Cengiz Balta,Melih Kuncan (2019). COMPARISON OF PARAMETERIZATION METHODS USED FOR B-SPLINE CURVE INTERPOLATION.
H (2018). Sürü Halı̇ nde Görev Yapan İnsansiz Hava Araçları ve Teknolojı̇ lerı.
Z Arya,V Tiwari (2020). Automatic Face Recognition and Detection Using OpenCV, Haar Cascade and Recognizer for Frontal Face.
A Kaplan (2018). Gerçek ve Yarı Gerçek Zamanlı Yüz Tespit Etme.
P Viola,M Jones (2001). Rapid object detection using a boosted cascade of simple features.
R Schapire (1999). A brief introduction to boosting.
No ethics committee approval was required for this article type.
Data Availability
Not applicable for this article.
How to Cite This Article
Engin Güzel. 2026. \u201cUAV Application with Moving Human Face Detection and Tracking\u201d. Global Journal of Science Frontier Research - I: Interdisciplinary GJSFR-I Volume 22 (GJSFR Volume 22 Issue I2).
Explore published articles in an immersive Augmented Reality environment. Our platform converts research papers into interactive 3D books, allowing readers to view and interact with content using AR and VR compatible devices.
Your published article is automatically converted into a realistic 3D book. Flip through pages and read research papers in a more engaging and interactive format.
Our website is actively being updated, and changes may occur frequently. Please clear your browser cache if needed. For feedback or error reporting, please email [email protected]
Thank you for connecting with us. We will respond to you shortly.


































































